Your browser does not seem to support JavaScript. As a result, your viewing experience will be diminished, and you have been placed in read-only mode.
Please download a browser that supports JavaScript, or enable it if it's disabled (i.e. NoScript).
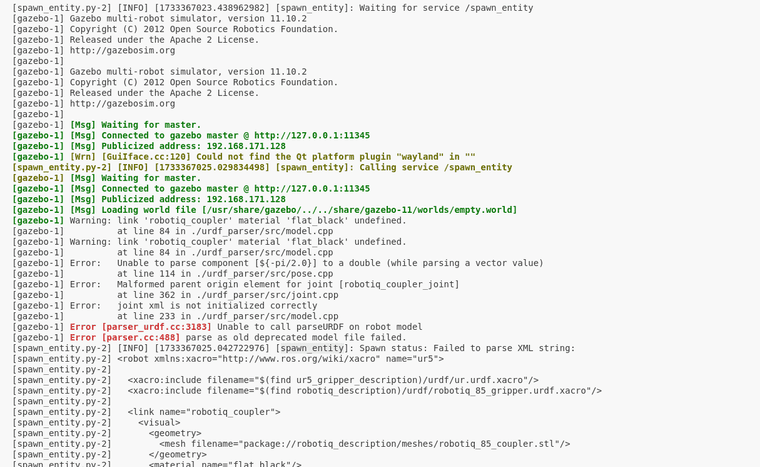
这里用ur5机械臂和85夹爪组转了一个axcro文件,这个文件在rviz中可以显示,但是在gezebo里面解析不了。
报错内容如图所示:
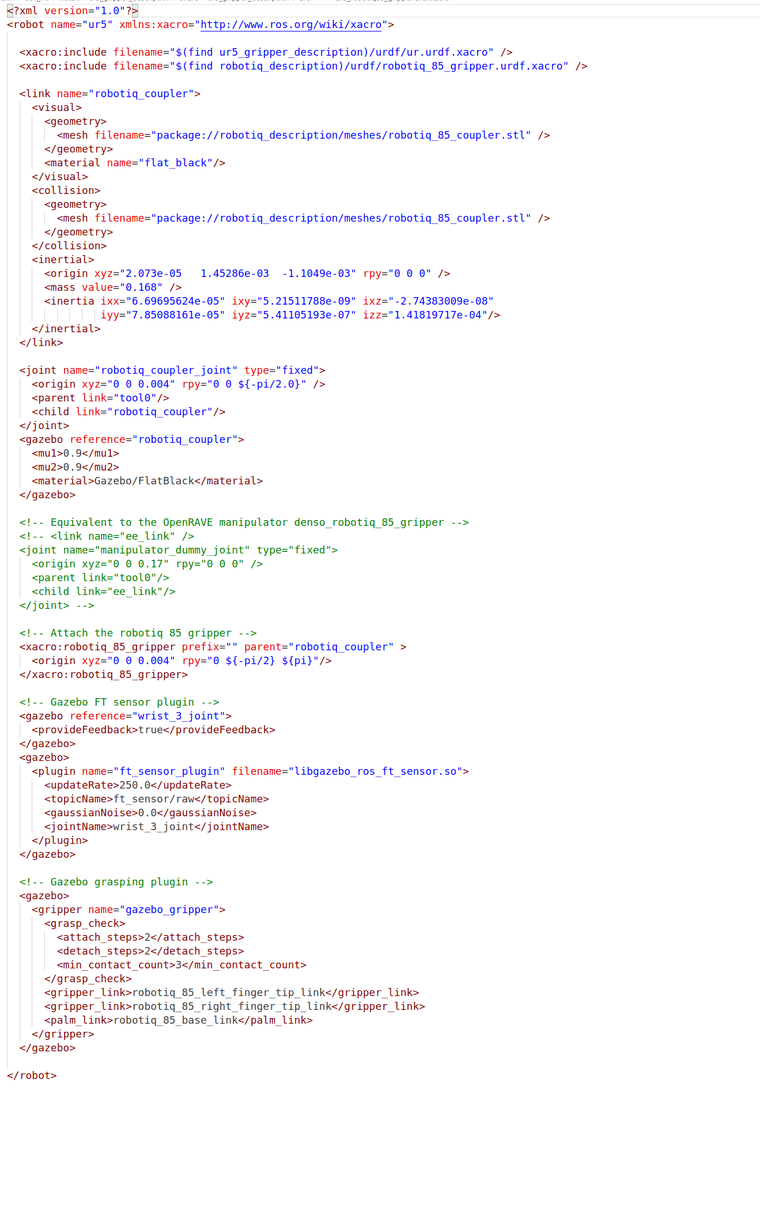
axcro文件如图: