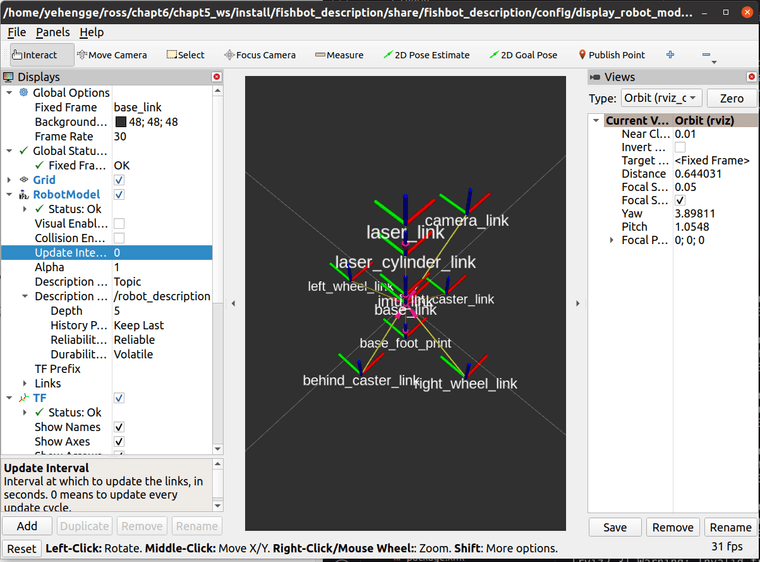
给小车添加质量和惯性后,rviz中没有显示Mass Property这个目录
-
在跟着动手学ros的课程中,添加了质量和惯性的代码,跟小鱼的代码一样的,构建成功,rviz运行成功,但是没有显示Mass Property这个目录
-
在ROS(Robot Operating System)环境中,使用Rviz进行机器人仿真时,遇到添加了质量和惯性的代码后Rviz中没有显示“Mass Property”这个目录的问题,可能并不是因为Rviz本身应该直接显示这个“Mass Property”目录。通常,质量和惯性等属性是在URDF(Unified Robot Description Format)文件中定义的,而不是直接在Rviz的某个目录下显示。以下是一些可能的解决方案和检查步骤:
-
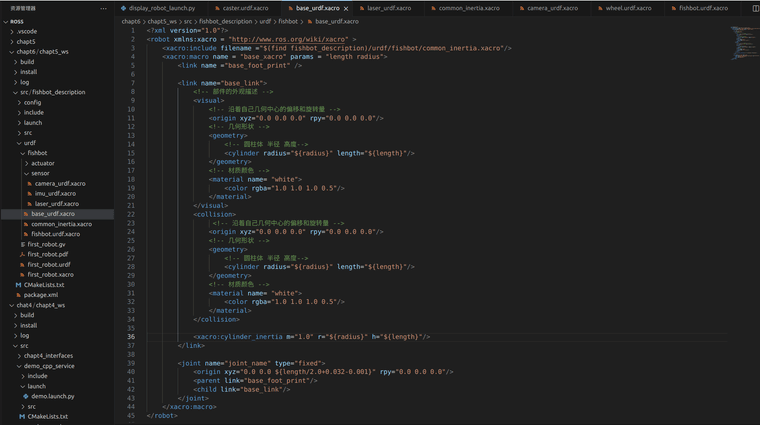
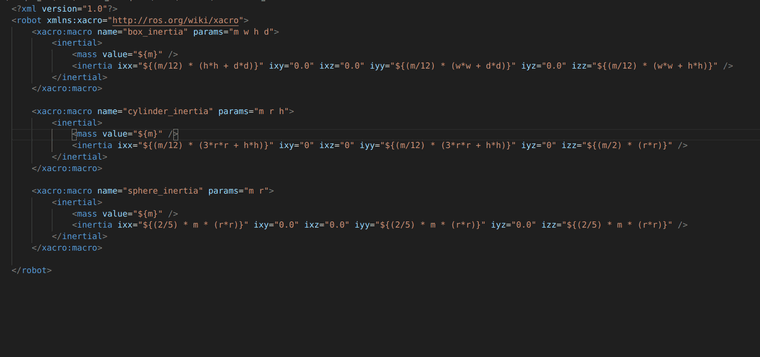
检查URDF文件:
- 确保你的URDF文件中正确添加了质量和惯性属性。这通常是在
<link>标签内部通过<inertia>标签来定义的。 - 例如:
<link name="link_name"> <inertia ixx="xx" ixy="0" ixz="0" iyy="xx" iyz="0" izz="xx"/> <!-- 其他属性 --> </link> - 这里的
ixx、iyy、izz是绕x、y、z轴的惯性矩,而ixy、ixz、iyz是惯性积,对于对称的物体,惯性积通常为0。
- 确保你的URDF文件中正确添加了质量和惯性属性。这通常是在
-
重新编译和启动:
- 在修改了URDF文件后,需要重新编译你的ROS工作空间。
- 使用
catkin_make或catkin build来编译你的工作空间。 - 编译成功后,重新启动Rviz和相关的ROS节点。
-
检查Rviz配置:
- 在Rviz中,确保你已经添加了正确的显示项,比如RobotModel,它应该能够显示URDF文件中定义的机器人模型,包括其质量和惯性属性(虽然这些属性不会以“Mass Property”目录的形式直接显示)。
- 检查Rviz的Global Options,确保Fixed Frame设置正确,通常应该设置为机器人的基座链接(如
base_link)。
-
查看日志和错误信息:
- Rviz和ROS都会生成日志文件,记录运行过程中的错误和警告信息。
- 查看这些日志文件,可能会找到导致模型无法显示或属性未正确加载的原因。
-
寻求社区帮助:
- 如果以上步骤都没有解决问题,你可以考虑在ROS的官方论坛、Q&A网站(如Stack Overflow)或相关的GitHub仓库中提问。
- 在提问时,提供详细的错误信息和相关代码(如URDF文件的部分内容),以便他人更好地理解你的问题并提供帮助。
-
注意软件和环境的兼容性:
- 确保你使用的ROS版本、Rviz版本和其他相关软件都是兼容的。
- 有时候,软件更新或版本不匹配可能会导致一些问题。
综上所述,“Mass Property”这个目录在Rviz中可能并不存在,而是质量和惯性等属性应该在URDF文件中定义,并通过RobotModel等显示项在Rviz中间接显示。如果确实需要查看或修改这些属性,应该直接编辑URDF文件并重新编译启动ROS工作空间。
以上为生成回答,仅供参考~
-
-
知道了 foxy版本似乎没有