这个问题咋办呢
-

-
您的问题非常宽泛,没有提供具体的背景或情境,所以我无法给出一个确切的解决方案。不过,我可以提供一些一般性的建议来帮助您应对不同类型的问题:
-
明确问题:
- 清晰地定义问题是什么。
- 识别问题的关键要素和限制条件。
-
收集信息:
- 查找与问题相关的所有信息。
- 咨询专业人士或相关领域的专家。
-
分析问题:
- 使用逻辑和批判性思维来分析问题的根本原因。
- 识别可能的影响和后果。
-
制定解决方案:
- 根据问题的性质制定一个或多个可能的解决方案。
- 考虑每个方案的优缺点。
-
实施解决方案:
- 选择一个最合适的解决方案并实施。
- 监控实施过程,确保按计划进行。
-
评估结果:
- 检查解决方案是否有效解决了问题。
- 如果问题仍然存在,重新评估并调整解决方案。
-
学习经验:
- 从解决问题的过程中学习并总结经验教训。
- 为未来类似的问题制定预防措施。
如果您能提供更多的上下文或具体信息,我将能够给出更具体和针对性的建议。例如,如果问题涉及到技术、法律、人际关系、健康、财务等方面,我可以提供更详细的指导。
以上为生成回答,仅供参考~
-
-
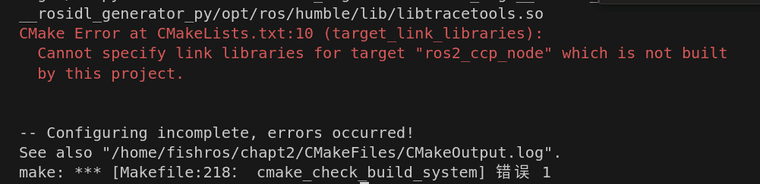
cmake_minimum_required(VERSION 3.10)
项目名称
project(ros_cpp_node)
编译选项
add_compile_options(-std=c++17)
搜索系统包,一般ros的包都在这里添加
find_package(
rclcpp REQUIRED
)当前项目的头文件搜索路径,系统路径是默认的,无需添加
include会默认搜索CMakeLists.txt所在的同级目录下名为include的文件夹
include_directories(
include
${rclcpp_INCLUDE_DIRS}
)自动搜索指定目录下所有后缀为.cc .hpp .cpp .cxx的文件作为源文件,并存入SOURCE(可自定义名称)变量中
PROJECT_SOURCE_DIR为CMakeLists.txt文件所在路径,${PROJECT_SOURCE_DIR}是CMake语法,表示使用PROJECT_SOURCE_DIR这个变量的值
aux_source_directory(${PROJECT_SOURCE_DIR} SOURCE)
设置可执行文件名,并指定源文件
add_executable(ros_cpp_node
${SOURCE}
)设置可执行文件的以来库,即g++语法中的-lXXX 选项
target_link_libraries(ros_cpp_node
${rclcpp_LIBRARIES}
)