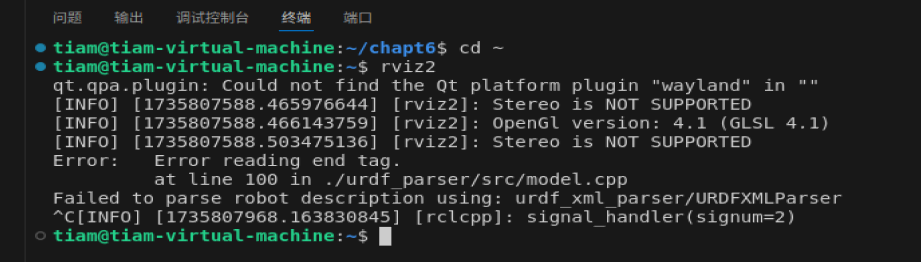
Ros2中运行rviz2 无法加载URDF文件
-
-
在ROS 2中使用RViz 2加载URDF文件时遇到问题可能有几个原因。以下是一些常见的故障排除步骤和解决方案:
-
确保URDF文件正确:
- 检查URDF文件的语法是否正确。可以使用
check_urdf工具来验证URDF文件是否有语法错误。 - 确保URDF文件中引用的所有资源(如mesh文件)的路径都是正确的,并且这些文件对RViz 2是可访问的。
- 检查URDF文件的语法是否正确。可以使用
-
正确设置参数服务器:
- 在ROS 2中,你需要确保URDF文件被正确加载到参数服务器上。你可以使用
ros2 param set命令或在一个launch文件中设置参数。 - 例如,如果你有一个名为
robot_description的参数,你可以使用以下命令加载URDF:ros2 param set /your_robot_namespace robot_description "$(cat path/to/your/urdf_file.urdf)" - 确保命名空间(
/your_robot_namespace)与你在RViz 2中设置的命名空间相匹配。
- 在ROS 2中,你需要确保URDF文件被正确加载到参数服务器上。你可以使用
-
在RViz 2中加载URDF:
- 打开RViz 2。
- 在左下角的“Add”按钮中选择“By display type”。
- 在显示类型列表中找到并选择“RobotModel”。
- 在右侧的面板中,确保“Fixed Frame”设置为你的机器人所在的参考坐标系(通常是
map或base_link)。 - 确保“URDF”字段设置为
robot_description(这是参数服务器的参数名,用于存储URDF数据)。
-
检查资源路径:
- 如果URDF文件中引用了外部资源(如STL或DAE文件),确保这些文件的路径对于RViz 2来说是可访问的。在ROS 2中,通常需要将这些资源文件放在工作空间的某个目录下,并确保该目录被包含在ROS 2的资源路径中。
- 你可以使用
ros2 pkg prefix命令找到包的安装路径,并确保资源文件相对于这个路径是正确的。
-
查看RViz 2和ROS 2的日志:
- 如果RViz 2无法加载URDF,查看RViz 2和ROS 2的终端输出日志,可能会有有用的错误信息。
-
使用launch文件:
- 如果手动设置参数和启动RViz 2太繁琐,考虑编写一个launch文件来自动处理这些步骤。在launch文件中,你可以使用
<param>标签来设置robot_description参数,并使用<node>标签来启动RViz 2。
- 如果手动设置参数和启动RViz 2太繁琐,考虑编写一个launch文件来自动处理这些步骤。在launch文件中,你可以使用
如果以上步骤都无法解决问题,请确保你的ROS 2和RViz 2安装是最新的,并且所有依赖都已正确安装。在某些情况下,重新安装或更新到最新版本的ROS 2和RViz 2可以解决兼容性问题。
以上为生成回答,仅供参考~
-