求助:fishbot学习到自定义接口时,编译工程失败
-
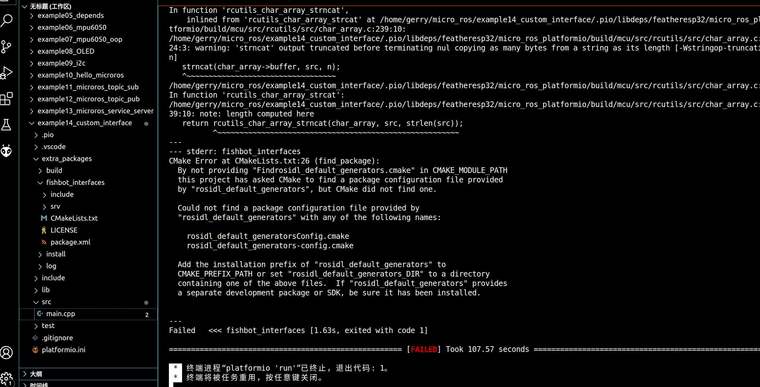
学习到教程自定义接口 https://fishros.com/d2lros2/#/humble/chapt14/advance/1.控制OLED-自定义消息接口 时,为什么在编译功能包成功,并删除文件夹后后,在编译工程时失败了?
试了好几次都失败了;而且前边的功能包是不是要在.xml文件中加上<member_of_group>rosidl_interface_packages</member_of_group>才能够编译成功?我是加上了这句才colcon build通过的,但是下一步的编译工程就失败的
-
@Gerry 环境有问题,找人帮看了一晚上,安了依赖终于好用了


-
当你在使用 ROS 2 和 FishBot 学习自定义消息接口时遇到编译失败的问题,这通常是由多种原因引起的。以下是一些可能的解决步骤和建议,帮助你排查和解决问题:
-
清理构建和安装环境:
- 在尝试重新编译之前,确保你的构建(
build)和安装(install)目录是干净的。你可以通过删除这些目录来做到这一点。例如,如果你的工作空间位于~/fishbot_ws,你可以运行:rm -rf ~/fishbot_ws/build ~/fishbot_ws/install - 然后重新运行
colcon build。
- 在尝试重新编译之前,确保你的构建(
-
检查
package.xml和CMakeLists.txt:- 确保你的
package.xml和CMakeLists.txt文件正确无误。特别是package.xml中应包含所有必要的依赖项和导出信息。 - 对于自定义消息,确保在
CMakeLists.txt中正确调用了ament_generate_messages()和相关的宏。
- 确保你的
-
关于
<member_of_group>标签:<member_of_group>rosidl_interface_packages</member_of_group>标签通常用于指示该包包含 ROS IDL 接口定义。如果你的包确实定义了消息、服务或动作类型,那么这个标签是必要的。- 确保这个标签的添加是正确的,并且其他相关设置(如依赖项)也是正确的。
-
检查自定义消息的定义:
- 确保你的
.msg或.srv文件没有语法错误。 - 如果你的消息依赖于其他非标准消息类型,确保这些依赖也被正确声明和安装。
- 确保你的
-
依赖项和环境:
- 确保所有必要的依赖项都已正确安装,并且你的 ROS 2 环境设置正确(例如,source 了正确的 setup.bash 文件)。
- 检查是否有任何包或依赖项版本冲突。
-
查看编译错误:
- 仔细查看
colcon build的输出,找到具体的错误信息。这通常会给出编译失败的具体原因。 - 根据错误信息调整代码或配置。
- 仔细查看
-
重新生成工作空间:
- 如果上述步骤都没有解决问题,尝试完全重新创建你的 ROS 2 工作空间,包括重新初始化工作空间目录和所有包。
-
查阅文档和社区资源:
- 查阅 FishBot 和 ROS 2 的官方文档,看看是否有关于你遇到的具体问题的指导。
- 在 ROS 社区论坛或 GitHub 仓库中搜索类似的问题和解决方案。
通过遵循这些步骤,你应该能够诊断并解决编译失败的问题。如果问题仍然存在,可能需要更详细的错误信息来进一步分析。
以上为生成回答,仅供参考~
-
-
@Gerry 环境有问题,找人帮看了一晚上,安了依赖终于好用了
-
G Gerry 将这个主题标记为已解决,在