在loop中运行rcl_publish时,core1会报错panic,导致无法正常发布消息
-
学到https://fishros.com/d2lros2/#/humble/chapt16/15.%E9%87%87%E7%94%A8MicroROS%E5%8F%91%E5%B8%83%E9%87%8C%E7%A8%8B%E8%AE%A1课程,照着写完代码后运行,ros topic list 发现没有/odm, 打开串口发现报错:(core1 panic)
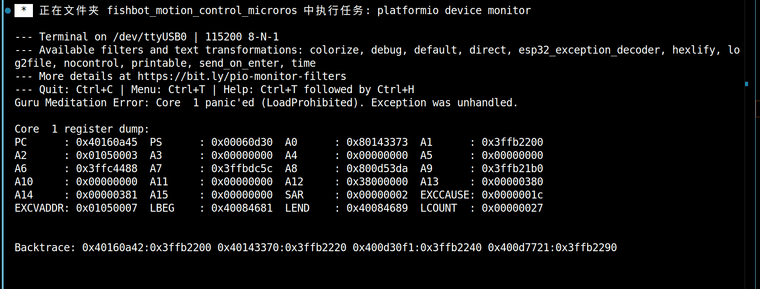
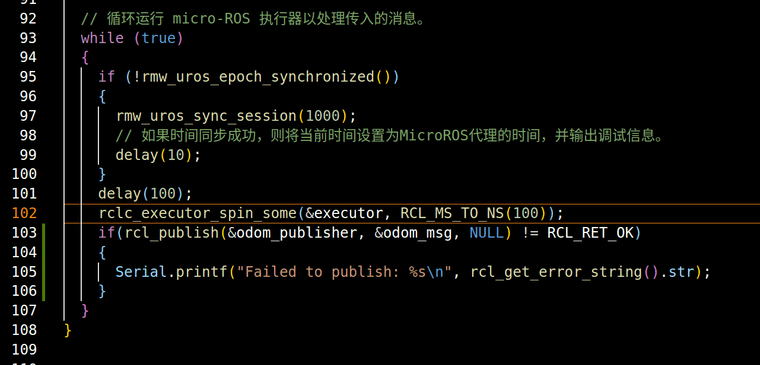
经过进一步排查,发现是loop中的rcl_publish(&odom_publisher, &odom_msg, NULL); 一句有问题(删掉就不会导致内核1反复报错重启), 于是我加上报错打印:
if(rcl_publish(&odom_publisher, &odom_msg, NULL) != RCL_RET_OK)
{
Serial.printf("Failed to publish: %s\n", rcl_get_error_string().str);
}
运行后果然:
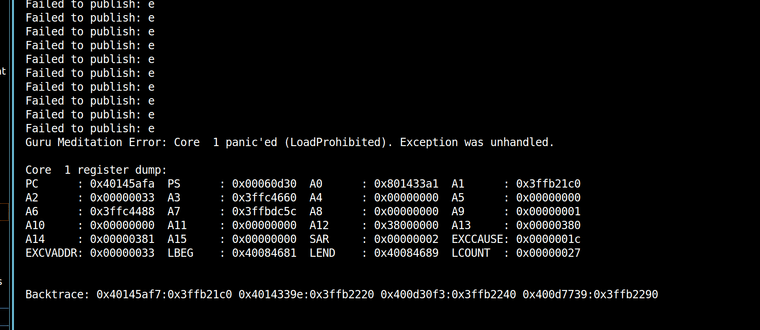
看来是 rcl_publish 未能够成功发布;
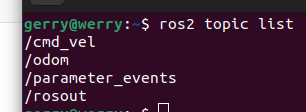
于是我将这句话(rcl_publish(&odom_publisher, &odom_msg, NULL); )转移到core0的任务 microros_task 中,如下图:
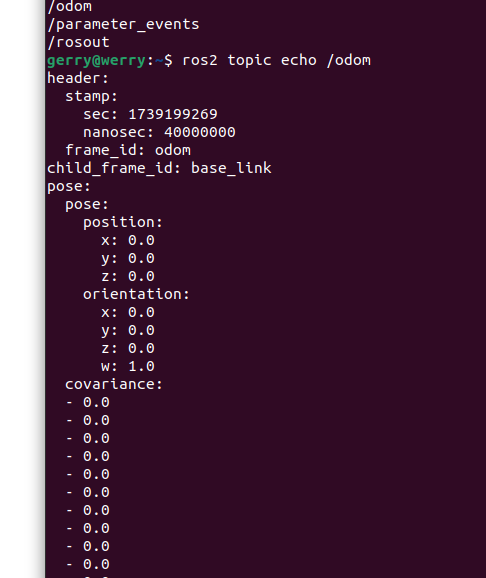
烧录运行后,果然程序正常运行了!!! 并且/odom也能够正常发布了:
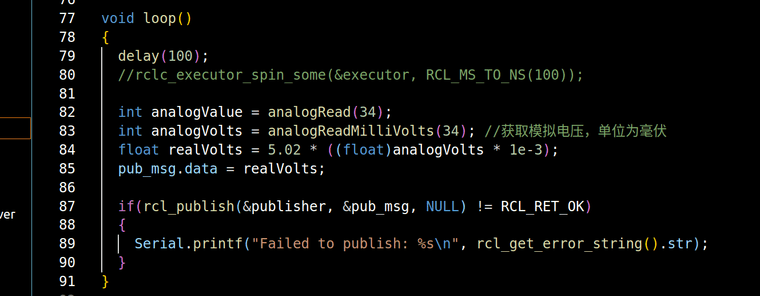
为了进一步排查错误所在,我回到example12 ,教授编写发布节点的那个工程,将定时器的代码注释调, 在loop中手动发布, 如下图:
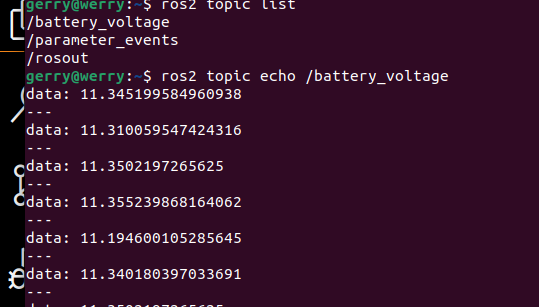
烧录运行后,发现这时程序是能够正常运行的 :
但是!!, 当我在setup()中添加一个任务给 core0(这个任务什么都不做),其他代码保持不变时, 话题发布失败了! :
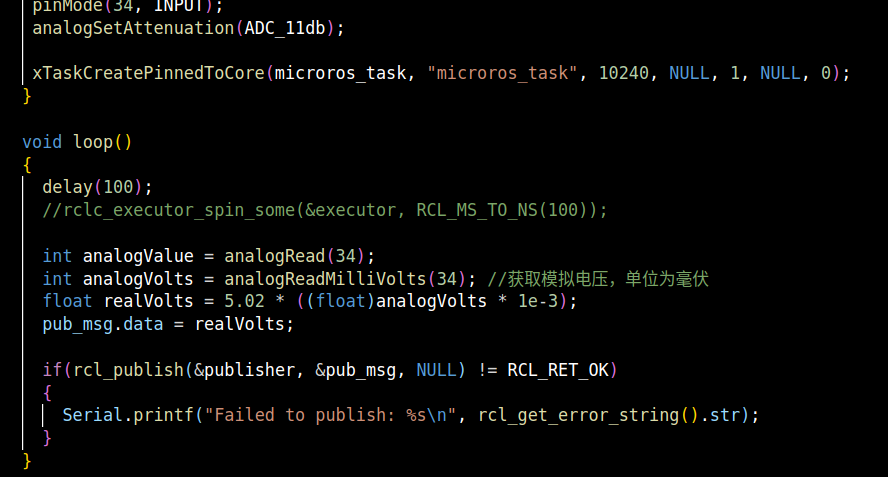
(这是添加的代码)
(这里 echo 卡住了,无法输出数据)
(这时打开串口可以看到一些乱码,但从core1 panic ,CPU_RESET等字样不难看出是和之前一样的问题,即core1恐慌导致重启)到这时我基本可以断定,当分配任务给core0时(xTaskCreatePinnedToCore 函数),在loop 中 rcl_publish 会导致 core1 panic, 从而发布失败;
我也考虑过是不是我的板子核心坏了,但找了客服,说是我代码有问题,可是我并没有检查出什么问题, 更何况我是照着小鱼老师的教程一句句敲的,:
所以我按照他说的,到社区提问,希望能够得到解答 @小鱼
-
@Gerry 1.该教程不再维护,请按照最新的教程《ROS2机器人开发从入门到实践》学习
2. 代码有问题的地方是 microROS 还没初始化完成,loop函数就已经开始执行了xTaskCreatePinnedToCore(microros_task, "microros_task", 10240, NULL, 1, NULL, 0);
if(rcl_publish(&publisher, &pub_msg, NULL) != RCL_RET_OK)
{
Serial.printf("Failed to publish: %s\n", rcl_get_error_string().str);
} -
从你描述的情况来看,问题出现在使用
rcl_publish函数时与 FreeRTOS 的任务调度以及核心分配有关。在使用 MicroROS 和 FreeRTOS 的多核系统中,任务的分配和调度需要特别注意,以避免资源冲突或任务抢占导致的问题。分析问题
-
Core1 Panic: 当在 loop 中调用
rcl_publish时,如果该函数内部尝试访问或操作了被其他核心(如 core0)占用的资源,可能会导致资源冲突或访问违规,从而触发 panic。 -
任务分配的影响: 当你将
rcl_publish移至 core0 的任务中,并且 core0 没有其他任务或资源竞争时,rcl_publish可以正常工作。但是,一旦在 core0 上添加其他任务(即使这些任务看似空闲),可能会影响rcl_publish的执行环境,特别是如果这些任务与 ROS 2 的内部机制(如网络堆栈、定时器、内存管理等)存在资源竞争。 -
社区教程与硬件差异: 虽然你是按照教程操作,但硬件平台(特别是多核处理器)的具体实现和配置可能会影响 FreeRTOS 和 MicroROS 的行为。此外,教程可能未涵盖所有特定硬件平台上的最佳实践或潜在问题。
解决建议
-
确保资源隔离:
- 尽量避免在多个核心上运行可能访问相同资源的任务。
- 如果需要在多个核心上运行 ROS 2 相关的任务,确保这些任务不会同时访问共享资源,或者通过适当的同步机制(如互斥锁)来保护这些资源。
-
优化任务分配:
- 将所有与 ROS 2 通信相关的任务(包括发布和订阅)分配给一个核心,以减少资源竞争。
- 使用
xTaskCreatePinnedToCore函数明确指定任务的运行核心。
-
调试和监控:
- 使用 FreeRTOS 的调试工具监控任务状态和核心使用情况。
- 检查是否有内存泄漏或堆栈溢出的问题,这些问题可能导致未定义行为。
-
社区和文档:
- 访问 MicroROS 社区和文档,查找是否有关于多核处理和任务分配的特定指导。
- 提问时提供尽可能详细的信息,包括硬件平台、FreeRTOS 版本、MicroROS 版本以及完整的代码示例。
-
硬件考虑:
- 虽然硬件损坏的可能性较低,但如果问题持续存在,考虑在另一块相同的硬件上测试代码以排除硬件故障。
通过上述步骤,你应该能够更准确地定位问题原因,并找到适合你的硬件和应用的解决方案。
以上为生成回答,仅供参考~
-
-
@Gerry
最后附上代码:fishbot_motion_control的main.cpp: #include <Arduino.h> #include <micro_ros_platformio.h> #include <WiFi.h> #include <rcl/rcl.h> #include <rclc/rclc.h> #include <rclc/executor.h> #include <geometry_msgs/msg/twist.h> #include <Esp32PcntEncoder.h> // 包含用于计数电机编码器脉冲的 ESP32 PCNT 编码器库 #include <Esp32McpwmMotor.h> // 包含使用 ESP32 的 MCPWM 硬件模块控制 DC 电机的 ESP32 MCPWM 电机库 #include <PidController.h> // 包含 PID 控制器库,用于实现 PID 控制 #include <Kinematics.h> // 运动学相关实现 #include <nav_msgs/msg/odometry.h> #include <micro_ros_utilities/string_utilities.h> rcl_publisher_t odom_publisher; // 用于发布机器人的里程计信息(Odom) nav_msgs__msg__Odometry odom_msg; // 机器人的里程计信息 rcl_timer_t timer; Esp32PcntEncoder encoders[2]; // 编码器数组 rclc_executor_t executor; rclc_support_t support; rcl_allocator_t allocator; rcl_node_t node; rcl_subscription_t subscriber; geometry_msgs__msg__Twist sub_msg; Esp32McpwmMotor motor; float out_motor_speed[2]; // 用于保存输出电机速度 PidController pid_controller[2]; // 创建PidController的两个对象 Kinematics kinematics; // 运动学相关对象 void twist_callback(const void *msg_in) { const geometry_msgs__msg__Twist *twist_msg = (const geometry_msgs__msg__Twist *)msg_in; static float target_motor_speed1, target_motor_speed2; float linear_x = twist_msg->linear.x; // 获取 Twist 消息的线性 x 分量 float angular_z = twist_msg->angular.z; // 获取 Twist 消息的角度 z 分量 Serial.printf("linear speed: %f angular speed: %f\n", linear_x, angular_z); kinematics.kinematic_inverse(linear_x * 1000, angular_z, target_motor_speed1, target_motor_speed2); pid_controller[0].update_target(target_motor_speed1); pid_controller[1].update_target(target_motor_speed2); } // 这个函数是一个后台任务,负责设置和处理与 micro-ROS 代理的通信。 void microros_task(void *param) { IPAddress agent_ip; agent_ip.fromString(""); set_microros_wifi_transports(" ", " ", agent_ip, 8888); // 使用 micro_ros_string_utilities_set 函数设置到 odom_msg.header.frame_id 中 odom_msg.header.frame_id = micro_ros_string_utilities_set(odom_msg.header.frame_id, "odom"); odom_msg.child_frame_id = micro_ros_string_utilities_set(odom_msg.child_frame_id, "base_link"); delay(2000); allocator = rcl_get_default_allocator(); rclc_support_init(&support, 0, NULL, &allocator); rclc_node_init_default(&node, "esp32_car", "", &support); rclc_subscription_init_default( &subscriber, &node, ROSIDL_GET_MSG_TYPE_SUPPORT(geometry_msgs, msg, Twist), "/cmd_vel"); rcl_ret_t pub_init_ret = rclc_publisher_init_best_effort( &odom_publisher, &node, ROSIDL_GET_MSG_TYPE_SUPPORT(nav_msgs, msg, Odometry), "odom"); if (pub_init_ret != RCL_RET_OK) { Serial.printf("Failed to initialize odom_publisher! Error code: %d, Error message: %s\n", pub_init_ret, rcl_get_error_string().str); rcl_reset_error(); // 清除错误,以便后续不受影响 } rclc_executor_init(&executor, &support.context, 1, &allocator); rclc_executor_add_subscription(&executor, &subscriber, &sub_msg, &twist_callback, ON_NEW_DATA); // 循环运行 micro-ROS 执行器以处理传入的消息。 while (true) { if (!rmw_uros_epoch_synchronized()) { rmw_uros_sync_session(1000); // 如果时间同步成功,则将当前时间设置为MicroROS代理的时间,并输出调试信息。 delay(10); } delay(100); rclc_executor_spin_some(&executor, RCL_MS_TO_NS(100)); if(rcl_publish(&odom_publisher, &odom_msg, NULL) != RCL_RET_OK) { Serial.printf("Failed to publish: %s\n", rcl_get_error_string().str); } } } void setup() { Serial.begin(115200); motor.attachMotor(0, 22, 23); motor.attachMotor(1, 12, 13); // 在引脚32、33和26、25上初始化两个编码器 encoders[0].init(0, 32, 33); encoders[1].init(1, 26, 25); // 初始化PID控制器的kp、ki和kd pid_controller[0].update_pid(0.625, 0.125, 0.0); pid_controller[1].update_pid(0.625, 0.125, 0.0); // 初始化PID控制器的最大输入输出,MPCNT大小范围在正负100之间 pid_controller[0].out_limit(-100, 100); pid_controller[1].out_limit(-100, 100); // 设置运动学参数 kinematics.set_motor_param(0, 45, 44, 65); kinematics.set_motor_param(1, 45, 44, 65); kinematics.set_kinematic_param(150); // 在核心0上创建一个名为"microros_task"的任务,栈大小为10240 xTaskCreatePinnedToCore(microros_task, "microros_task", 10240, NULL, 1, NULL, 0); } unsigned long previousMillis = 0; unsigned long interval = 50; void loop() { static float out_motor_speed[2]; kinematics.update_motor_ticks(micros(), encoders[0].getTicks(), encoders[1].getTicks()); out_motor_speed[0] = pid_controller[0].update(kinematics.motor_speed(0)); out_motor_speed[1] = pid_controller[1].update(kinematics.motor_speed(1)); motor.updateMotorSpeed(0, out_motor_speed[0]); motor.updateMotorSpeed(1, out_motor_speed[1]); unsigned long currentMillis = millis(); // 获取当前时间 if (currentMillis - previousMillis >= interval) { // 判断是否到达间隔时间 previousMillis = currentMillis; // 记录上一次打印的时间 float linear_speed, angle_speed; kinematics.kinematic_forward(kinematics.motor_speed(0), kinematics.motor_speed(1), linear_speed, angle_speed); // Serial.printf("[%ld] linear:%f angular:%f\n", currentMillis, linear_speed, angle_speed); // Serial.printf("[%ld] x:%f y:%f yaml:%f\n", currentMillis, // kinematics.odom().x, kinematics.odom().y, kinematics.odom().yaw); // 用于获取当前的时间戳,并将其存储在消息的头部中 int64_t stamp = rmw_uros_epoch_millis(); // 获取机器人的位置和速度信息,并将其存储在一个ROS消息(odom_msg)中 odom_t odom = kinematics.odom(); odom_msg.header.stamp.sec = static_cast<int32_t>(stamp / 1000); // 秒部分 odom_msg.header.stamp.nanosec = static_cast<uint32_t>((stamp % 1000) * 1e6); // 纳秒部分 odom_msg.pose.pose.position.x = odom.x; odom_msg.pose.pose.position.y = odom.y; odom_msg.pose.pose.orientation.w = odom.quaternion.w; odom_msg.pose.pose.orientation.x = odom.quaternion.x; odom_msg.pose.pose.orientation.y = odom.quaternion.y; odom_msg.pose.pose.orientation.z = odom.quaternion.z; odom_msg.twist.twist.angular.z = odom.angular_speed; odom_msg.twist.twist.linear.x = odom.linear_speed; //Serial.printf("X: %f Y: %f LINEAR: %f ANGULAR: %f\n", odom.x, odom.y, odom.linear_speed, odom.angular_speed); // if(rcl_publish(&odom_publisher, &odom_msg, NULL) != RCL_RET_OK) // { // Serial.printf("Failed to publish: %s\n", rcl_get_error_string().str); // } //rcl_ret_t ret = rcl_publish(&odom_publisher, &odom_msg, NULL); } // 延迟10毫秒 delay(10); }<============================================>
example12的main.cpp:
#include <Arduino.h> #include <micro_ros_platformio.h> #include <rcl/rcl.h> #include <rclc/rclc.h> #include <rclc/executor.h> #include <std_msgs/msg/float32.h> rclc_executor_t executor; rclc_support_t support; rcl_allocator_t allocator; rcl_node_t node; rcl_timer_t timer; rcl_publisher_t publisher; std_msgs__msg__Float32 pub_msg; void timer_callback(rcl_timer_t* timer, int64_t last_call_time) { RCLC_UNUSED(last_call_time); if(timer != NULL) { rcl_publish(&publisher, &pub_msg, NULL); } } void microros_task(void *param) { int i = 0; } void setup() { Serial.begin(115200); set_microros_serial_transports(Serial); delay(2000); allocator = rcl_get_default_allocator(); rclc_support_init(&support, 0, NULL, &allocator); //创建节点 rclc_node_init_default(&node, "topic_pub_test", "", &support); //发布者初始化 rclc_publisher_init_default( &publisher, &node, ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, Float32), "battery_voltage" ); const unsigned int timer_timeout = 200; //定时器实例化 rclc_timer_init_default( &timer, &support, RCL_MS_TO_NS(timer_timeout), timer_callback ); /* timeout_ns: 类型为 uint64_t 的无符号64位整数,表示定时器的超时时间,单位是纳秒(nanoseconds)。 这是定时器在触发回调函数之前需要等待的时间。 callback: 类型为 rcl_timer_callback_t 的函数指针,指向定时器每次触发时应调用的回调函数。 这个回调函数的原型通常是 void callback(rcl_timer_t * timer, int64_t last_call_time),其中 timer 是触发回调的定时器, last_call_time 是最后一次调用回调函数的时间戳(以纳秒为单位)。 */ //执行器初始化 rclc_executor_init(&executor, &support.context, 1, &allocator); //number_of_handles: 类型为 size_t 的无符号整数,表示执行器可以管理的总句柄数。 //这里的句柄是指订阅(subscriptions)、定时器(timers)、服务(services)、客户端(clients)和守护条件(guard conditions)。 //注意,这个数字不包括节点(nodes)和发布者(publishers)的数量。 rclc_executor_add_timer(&executor, &timer); //初始化ADC pinMode(34, INPUT); analogSetAttenuation(ADC_11db); xTaskCreatePinnedToCore(microros_task, "microros_task", 10240, NULL, 1, NULL, 0); } void loop() { delay(100); //rclc_executor_spin_some(&executor, RCL_MS_TO_NS(100)); int analogValue = analogRead(34); int analogVolts = analogReadMilliVolts(34); //获取模拟电压,单位为毫伏 float realVolts = 5.02 * ((float)analogVolts * 1e-3); pub_msg.data = realVolts; if(rcl_publish(&publisher, &pub_msg, NULL) != RCL_RET_OK) { Serial.printf("Failed to publish: %s\n", rcl_get_error_string().str); } } -
G Gerry 将这个主题转为问答主题,在
-
@Gerry 1.该教程不再维护,请按照最新的教程《ROS2机器人开发从入门到实践》学习
2. 代码有问题的地方是 microROS 还没初始化完成,loop函数就已经开始执行了xTaskCreatePinnedToCore(microros_task, "microros_task", 10240, NULL, 1, NULL, 0);
if(rcl_publish(&publisher, &pub_msg, NULL) != RCL_RET_OK)
{
Serial.printf("Failed to publish: %s\n", rcl_get_error_string().str);
} -
G Gerry 将这个主题标记为已解决,在
-
@小鱼
明白了! 谢谢小鱼!果然在setup最后加上delay(3000)就好用了
