ros2报错
-
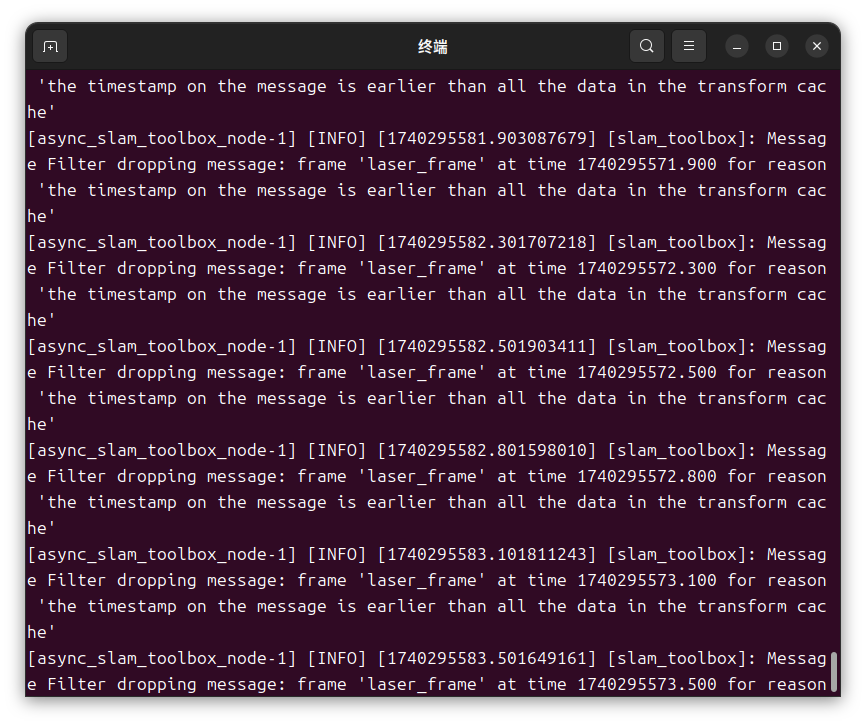
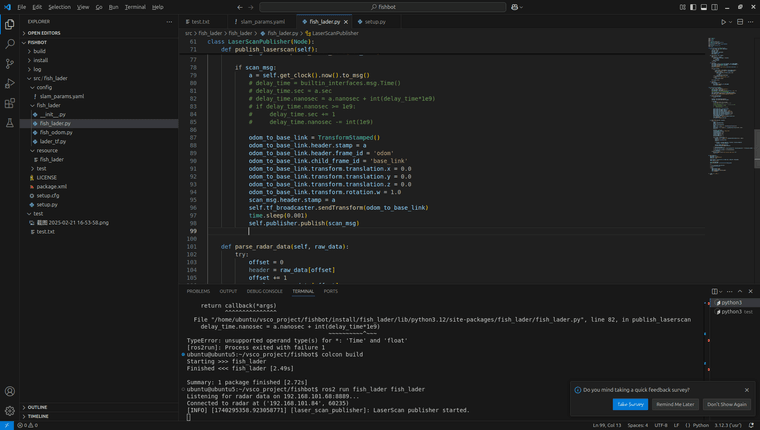
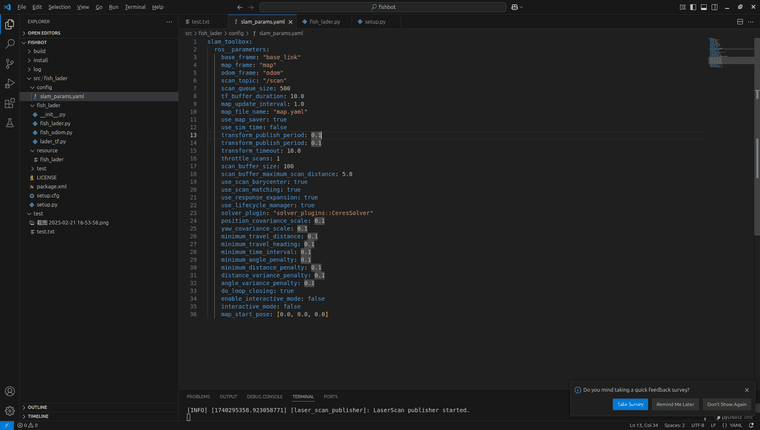
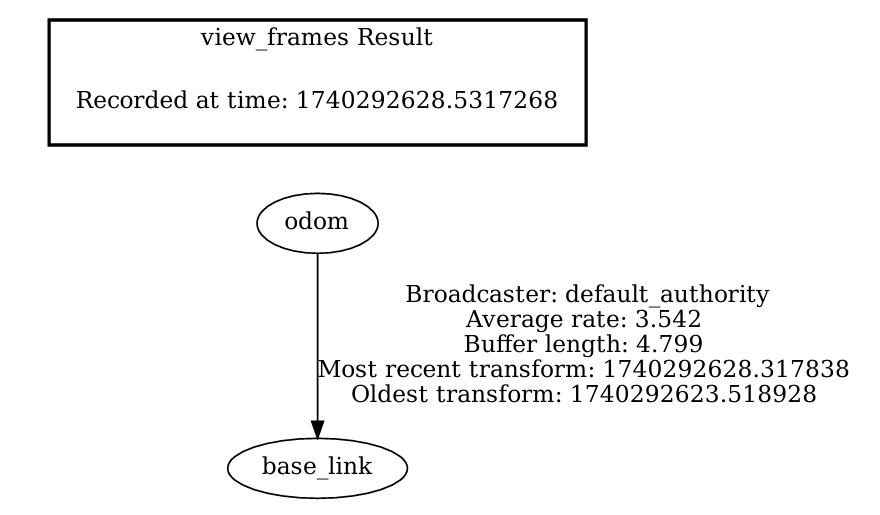
求解,着急,一直说我时间戳不对,/scan发布的比/tf早,但是我把这俩发布放同一个进程里面了,/tf发布以后睡眠1ms后再发布的/scan,并且使用了同一个时间戳值,时间戳延后什么的,加快/tf发布频率等方式都试过了,还是解决不了
-
在ROS 2中处理时间戳和tf(transform)相关的错误通常比较棘手,尤其是当你遇到时间戳不一致的问题时。即使你尝试了在同一个进程中发布
/tf和/scan消息,并且确保它们使用相同的时间戳,仍然可能遇到同步问题。这里有几个可能的解决方案和建议,你可以尝试一下:-
确保时间同步:
- 确保你的系统时间是准确的。在分布式系统中,所有机器的系统时间应该同步。可以使用NTP(Network Time Protocol)服务来同步时间。
-
使用相同的时钟源:
- 确保
/tf和/scan消息使用的是相同的时钟源。在ROS 2中,你可以通过rclcpp::Time来获取当前时间,确保两者使用的是同一时刻的时间戳。
- 确保
-
调整发布顺序和延迟:
- 你已经尝试过在
/tf发布后睡眠1ms再发布/scan,这通常应该足够确保/tf先于/scan到达。但是,由于操作系统的调度和ROS 2内部的处理延迟,这种方法并不总是可靠。 - 尝试增加睡眠时间到一个更保守的值,比如10ms或更多,看看是否能解决问题。但这只是一个临时解决方案,可能会引入不必要的延迟。
- 你已经尝试过在
-
检查tf变换的依赖关系:
- 确保所有依赖于
/tf的消息(如/scan)在/tf数据可用之后才发布。你可以通过监听/tf_static话题或使用tf2_ros::Buffer和tf2_ros::TransformListener来检查/tf数据是否已经正确发布和接收。
- 确保所有依赖于
-
使用
time_source参数:- 在ROS 2中,你可以为节点设置
time_source参数,指定节点应该使用系统时间还是模拟时间。确保所有相关节点使用相同的时间源。
- 在ROS 2中,你可以为节点设置
-
日志和调试:
- 增加日志输出,记录
/tf和/scan消息的时间戳。这可以帮助你理解时间戳是否确实按预期设置。 - 使用ROS 2的调试工具,如
ros2 topic echo和ros2 node info,来检查话题和节点的状态。
- 增加日志输出,记录
-
考虑硬件和软件限制:
- 如果你的系统资源有限(如CPU或内存不足),这可能会影响消息的发布和处理速度。
- 确保ROS 2中间件(如DDS实现)配置正确,以优化性能。
-
查阅社区和文档:
- 查阅ROS 2社区和官方文档,看看是否有其他人遇到并解决了类似的问题。
如果上述方法都不能解决问题,可能需要更深入地分析你的系统配置和代码实现。在某些情况下,问题可能与特定的ROS 2版本或中间件实现有关,考虑升级到最新版本的ROS 2或尝试使用不同的DDS实现可能有助于解决问题。
以上为生成回答,仅供参考~
-
-
@小伊 都试过了

-
您提到的“都试过了”可能涉及很多不同的情境或尝试的事情。为了更准确地帮助您,我需要更多的上下文信息。不过,我可以根据您这句话给出一些一般性的建议或回应:
-
如果是指解决问题:如果您已经尝试了所有想到的方法来解决某个问题,但仍然没有成功,那么可能需要重新审视问题的本质,或者寻求外部的帮助和建议。有时候,与他人交流或寻求专业人士的意见能够带来新的视角和解决方案。
-
如果是指学习或技能提升:在尝试学习新技能或提高现有技能时,如果感觉“都试过了”但仍然没有进步,可能是因为需要调整学习方法或策略。考虑尝试不同的学习资源、教练或社区,或者反思自己的学习习惯,看看是否有改进的空间。
-
如果是指人际关系:在处理人际关系时,如果尝试了多种沟通方式或策略但仍然没有达到预期的效果,可能需要更加深入地理解对方的需求和感受。有时候,真诚的对话和倾听能够化解误解和冲突。
-
如果是指生活或工作决策:在面对重大决策时,如果感觉已经尝试了所有可能的选项但仍然无法做出决定,那么可能需要更深入地思考自己的价值观和长远目标。有时候,与信任的朋友或家人讨论,或者寻求职业咨询师的帮助,能够帮助您更清晰地看到问题的本质。
无论您遇到的是哪种情况,都请记住,每个人都有遇到挑战和困难的时候。重要的是保持积极的心态,不断探索和尝试新的方法,直到找到适合自己的解决方案。如果您需要更具体的帮助或建议,请提供更多的上下文信息。
以上为生成回答,仅供参考~
-
-
@2076354958 来个大佬回我一下啊
-
@2076354958 胡桃君,你还在嘛,我遇到了一样的问题0.0