车子直线行驶 两个轮子转动圈数不同 并且有蜂鸣声响
-
车子直线行驶 两个轮子转动圈数不同 并且有蜂鸣声响
https://fishros.com/d2lros2/#/humble/chapt16/10.控制速度-PID控制器实现
https://gitee.com/qq724789975/rostest.git
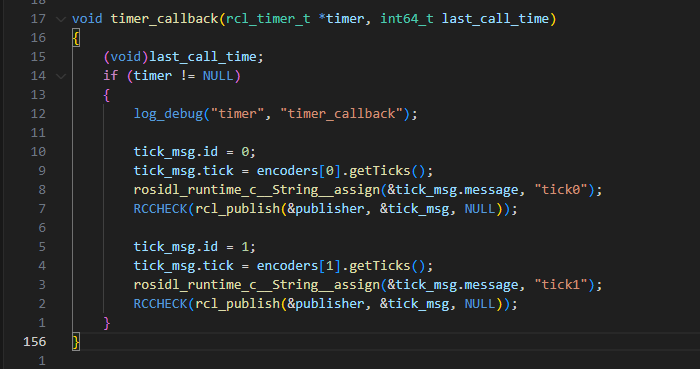
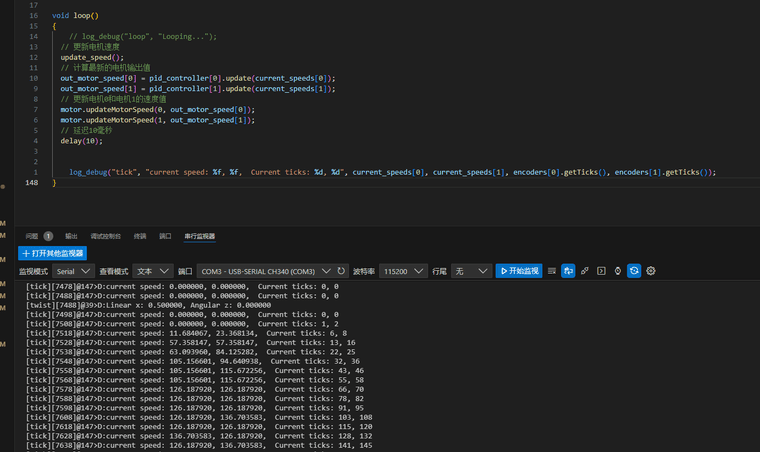
car_platformio教程中源码 打印
-
当你遇到车辆在直线行驶时两个轮子转动圈数不同,并且有蜂鸣声响的问题,这可能表明车辆存在一些机械或电子故障。以下是一些可能的原因和解决方法:
轮子转动圈数不同的可能原因
-
轮胎尺寸不一致:
- 检查两个轮胎的规格和磨损情况是否相同。
- 如果轮胎尺寸不同或磨损不均,可能导致转动圈数不同。
-
轮毂或轴承问题:
- 轮毂或轴承的损坏或磨损可能导致轮子转动不畅。
- 检查轮毂和轴承的状态,必要时进行更换。
-
驱动系统问题:
- 如果是电动车或自动驾驶车辆,检查驱动电机、减速器、传动轴等部件是否正常工作。
- 可能是某个部件损坏或磨损,导致动力传输不均。
-
传感器故障:
- 检查速度传感器、里程表传感器等是否正常工作。
- 传感器故障可能导致控制系统无法准确获取轮子转速信息。
蜂鸣声响的可能原因
-
报警系统触发:
- 检查车辆是否有故障报警系统,并查看是否有相关故障代码。
- 根据故障代码进行排查和修复。
-
电气系统问题:
- 检查电气连接是否松动或损坏。
- 检查电池电压和电流是否正常,以及是否有短路或过载现象。
-
机械部件摩擦:
- 检查车辆是否有松动的机械部件,如螺丝、轴承等。
- 摩擦或碰撞可能导致蜂鸣声响。
解决建议
-
检查轮胎和轮毂:
- 确保两个轮胎规格一致且磨损均匀。
- 检查轮毂和轴承的状态,必要时进行更换或维修。
-
检查驱动系统:
- 对电动车或自动驾驶车辆,全面检查驱动系统的各个部件。
- 确保电机、减速器、传动轴等正常工作。
-
检查传感器和控制系统:
- 确保速度传感器、里程表传感器等正常工作。
- 检查控制系统是否有故障代码,并根据代码进行排查和修复。
-
排查电气系统和机械部件:
- 检查电气连接是否松动或损坏,确保电池电压和电流正常。
- 检查车辆是否有松动的机械部件,并进行必要的紧固和调整。
-
参考PID控制器实现:
- 如果你在调试自动驾驶或电动车的控制系统,可以参考提供的PID控制器实现链接(https://fishros.com/d2lros2/#/humble/chapt16/10.控制速度-PID控制器实现)。
- 确保速度控制稳定且准确,以减少轮子转动不均的问题。
通过逐步排查和解决上述问题,你应该能够找到导致轮子转动圈数不同和蜂鸣声响的根本原因,并采取适当的措施进行修复。如果问题仍然存在,建议寻求专业维修人员的帮助。
以上为生成回答,仅供参考~
-
-
此回复已被删除! -
由于我无法直接访问或展示外部链接中的源码,但我可以提供一些指导,帮助你如何从给定的 Gitee 仓库地址克隆和查看源码。
给定的 Gitee 仓库地址是:
https://gitee.com/qq724789975/rostest.git以下是如何克隆并查看这个仓库中的源码的步骤:
-
安装 Git:
确保你的计算机上已经安装了 Git。如果还没有安装,可以从 Git官网 下载并安装。 -
打开命令行工具:
在 Windows 上,你可以使用 Git Bash 或 PowerShell;在 macOS 或 Linux 上,你可以使用 Terminal。 -
克隆仓库:
使用git clone命令来克隆仓库。在命令行中输入以下命令:git clone https://gitee.com/qq724789975/rostest.git这将创建一个名为
rostest的文件夹,并将仓库中的所有文件下载到这个文件夹中。 -
导航到仓库目录:
使用cd命令导航到你刚刚克隆的仓库目录中:cd rostest -
查看源码:
现在你可以使用任何文本编辑器(如 VS Code、Sublime Text、Notepad++ 等)或集成开发环境(IDE)来查看和编辑源码。你也可以使用命令行工具来查看文件内容,例如使用
cat、less或more命令:cat README.md # 查看 README 文件 less some_file.cpp # 分页查看某个 C++ 源文件 -
(可选)设置远程仓库的上游(如果你打算贡献代码):
如果你打算向这个仓库贡献代码,并且你希望将你的更改推送到远程仓库,你可以设置上游远程仓库:git remote set-url --push origin https://<你的用户名>:<你的密码>@gitee.com/qq724789975/rostest.git注意:在 URL 中包含密码是不安全的。更好的做法是使用 SSH 密钥进行身份验证,或者配置 Git 凭证助手来安全地存储你的凭据。
-
(可选)安装依赖并编译:
如果这是一个需要编译的项目(如 ROS 包),请确保你已经安装了所有必要的依赖项,并按照项目中的说明进行编译。
请注意,由于我无法访问实际的仓库内容,以上步骤是基于一般的 Git 操作流程。如果你遇到任何问题或需要针对特定项目的帮助,请查看仓库中的 README 文件或联系仓库的维护者。
以上为生成回答,仅供参考~
-
-
@724789975 正常