aruco 码识别
-
我使用aruco_ros获取到aruco码的位姿和opencv2.aruco里计算得到的旋转矩阵不一样,不知道哪里出问题了,希望有大佬能帮帮忙看看
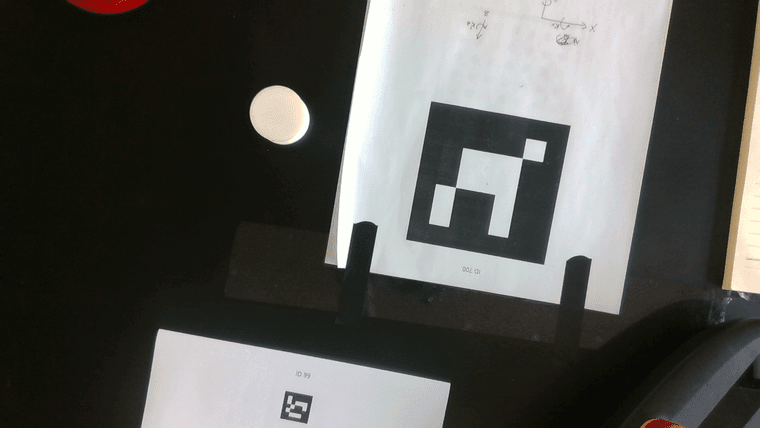
import cv2.aruco as aruco import math import numpy as np import cv2 def getImagePos(image, mark_id, mark_size, show=False): fx = 913.118 fy = 913.105 cx = 654.698 cy = 370.966 # 加载相机参数(必须事先校准相机) camera_matrix = np.array([[fx, 0, cx], [0, fy, cy], [0, 0, 1]]) # 替换为你的相机参数 dist_coeffs = np.array([0, 0, 0, 0, 0]) # 替换为你的畸变系数 # 定义ArUco字典 aruco_dict = aruco.getPredefinedDictionary(aruco.DICT_ARUCO_ORIGINAL) # 初始化检测器参数 parameters = aruco.DetectorParameters() # 创建检测器对象 detector = aruco.ArucoDetector(aruco_dict, parameters) # 读取图像 gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) # 检测标记 corners, ids, rejected = detector.detectMarkers(gray) # 定义标记实际尺寸(单位:米,需与实际打印尺寸一致) marker_size = 0.1 # 例如:5cm边长的标记 # 计算每个检测到的标记的位姿 rvecs, tvecs, _ = aruco.estimatePoseSingleMarkers( corners, marker_size, camera_matrix, dist_coeffs ) # 绘制检测结果 i = 0 # 绘制标记边框和ID image = aruco.drawDetectedMarkers(image, corners, ids) # 绘制位姿坐标系(X:红色, Y:绿色, Z:蓝色) cv2.drawFrameAxes(image, camera_matrix, dist_coeffs, rvecs[i], tvecs[i], marker_size / 2) if show: cv2.imshow('tt', image) cv2.waitKey() # 打印位姿信息 print(f"Marker ID: {ids[i][0]}") print(f"旋转向量: \n{rvecs[i]}") print(f"平移向量: \n{tvecs[i]}\n") t = tvecs[i][0] dis = math.sqrt(t[0]**2 + t[1]**2 + t[2]**2) print(f"相对距离: \n{dis}") # 旋转向量转欧拉角度 euler = [math.degrees(e) for e in rvecs[i][0]] print(f"旋转: \n{euler}") image = cv2.imread("Combined Image_screenshot_08.03.2025.png") getImagePos(image, 700, 0.1) # Marker ID: 700 # 旋转向量: # [[ 0.27634649 -3.11669144 -0.07238494]] # 平移向量: # [[ 0.07038931 -0.02667739 0.3864855 ]] # # 相对距离: # 0.39374786279149726 # 旋转: # [15.833487609229413, -178.57326528556658, -4.1473514458683685]原图
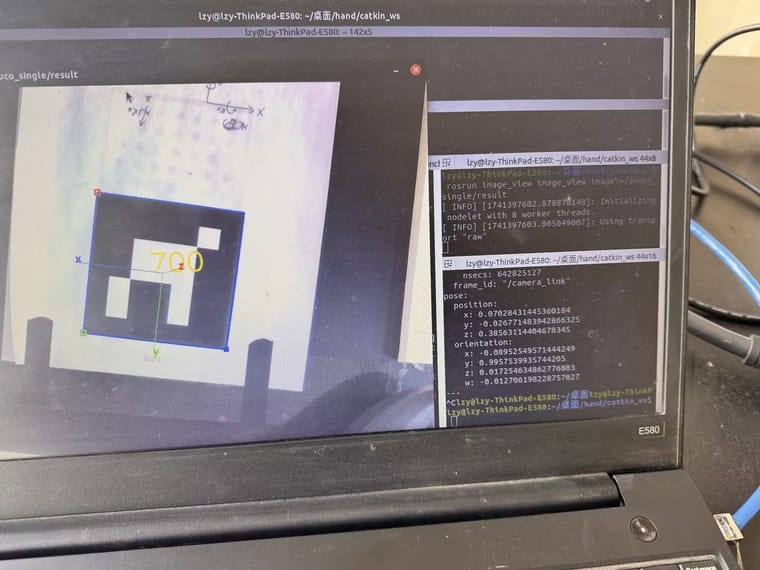
aruco_ros识别到的数据
-
在你的问题中,你提到使用 OpenCV 和
aruco_ros获取到的 ArUco 码的旋转矩阵不一致。这通常可能由以下几个原因引起:-
相机校准参数差异:确保 OpenCV 和
aruco_ros使用的相机内参(焦距、光心)和畸变系数完全一致。 -
标记尺寸不一致:在 OpenCV 和
aruco_ros中使用的 ArUco 标记的实际尺寸(marker_size)必须相同。 -
旋转矩阵表示方法:OpenCV 和 ROS 可能使用不同的旋转表示方法(如旋转向量、旋转矩阵、四元数等)。你需要确保在比较这些值时,它们被转换为相同的表示形式。
-
坐标系方向:检查 ROS 和 OpenCV 的坐标系方向是否一致。例如,OpenCV 默认使用右手坐标系,而 ROS 的坐标系可能根据具体实现有所不同。
-
数值精度:由于浮点运算的精度问题,即使理论上相同的计算也可能产生略微不同的结果。
首先,我们来修正你的 OpenCV 代码中的一些小错误,并确保我们能够正确地输出旋转矩阵:
修正 OpenCV 代码
-
修正相机矩阵的定义:
camera_matrix = np.array([[fx, 0, cx], [0, fy, cy], [0, 0, 1]]) -
修正旋转向量转欧拉角的代码:
rvec_matrix, _ = cv2.Rodrigues(rvecs[i][0]) euler_angles = cv2.decomposeProjectionMatrix(np.hstack((rvec_matrix, tvecs[i][:, np.newaxis], np.eye(3, 1))))[6] # 注意:这里可能需要进一步处理来获取正确的欧拉角 # 或者使用更简单的方法(但可能不精确): theta_x, theta_y, theta_z = rvecs[i][0] roll = np.degrees(theta_x) pitch = np.degrees(theta_y) yaw = np.degrees(theta_z) print(f"欧拉角: Roll={roll}, Pitch={pitch}, Yaw={yaw}")
检查 ROS 数据
对于
aruco_ros,你需要确保:- 使用的相机校准文件(通常是 YAML 格式)与 OpenCV 中使用的一致。
- 检查 ROS 节点发布的
/aruco_pose或类似话题中的位姿数据,确保你正确解析了这些消息。
比较旋转矩阵
由于 OpenCV 使用旋转向量,而 ROS 可能使用旋转矩阵或四元数,你需要将它们转换为相同的表示形式进行比较。例如,你可以将 OpenCV 的旋转向量转换为旋转矩阵,然后与 ROS 的旋转矩阵进行比较。
总结
确保所有参数(相机内参、畸变系数、标记尺寸)在两个系统中完全一致,并正确转换和比较旋转表示。如果问题仍然存在,你可能需要更深入地检查 ROS 节点的实现,或者考虑数值精度问题。
以上为生成回答,仅供参考~
-
-
好像我对旋转向量的理解弄错了
# 转旋转矩阵 rotation_matrix, _ = cv2.Rodrigues(rvecs[i]) print("旋转矩阵:\n", rotation_matrix) te = tfs.euler.mat2euler(rotation_matrix) euler = [math.degrees(e) for e in te] print(f"旋转: \n{euler}") # 旋转矩阵: # [[-0.98433795 -0.17557593 -0.01587109] # [-0.17612344 0.98333823 0.04501615] # [ 0.0077029 0.04710638 -0.99886018]] # 旋转: # [177.2999241238412, -0.44134783830292884, -169.8556541200813]这么操作后计算的手眼标定结果和ros_aruco一样,但角度还是不太一样
x= -0.3206890278648447 y= 0.9433653592637539 z= 0.01836774839137613 w= 0.08296367980809832 q = [w, x, y, z] m = tfs.quaternions.quat2mat(q) print(m) e = tfs.euler.mat2euler(m) print(e) d = [math.degrees(i) for i in e] print(d) # [[-0.78055115 -0.60810155 0.14474945] # [-0.60200613 0.79364235 0.08786608] # [-0.16831079 -0.01855609 -0.98555931]] # (-3.1227669003410075, 0.16911576446501436, -2.4846248148191847) # [-178.92136379268987, 9.689619552973825, -142.358515562613]