ROS2功能包cv_bridge 在docker镜像中交叉编译无法寻找到numpy头文件路径报错
-

尝试过在编译脚本中修改头文件环境、在cmakelists中添加绝对路径、动态寻找路径等方法,仍然无法解决。 -
@1051816350
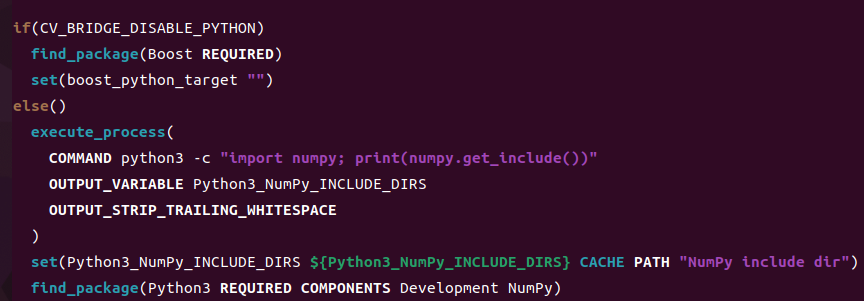
cmakelists中的尝试 -
@1051816350 这样用的原因是因为希望使用buildroot构建的根文件系统中可以直接运行自己的ros2项目,项目需要使用cv_bridge功能包,但是buildroot中没有安装编译器的环境,因此希望在x86架构下交叉编译。