树莓派4b-ubuntu usb直连,无法获取EAI S2雷达数据并显示
-
按照教程一步步操作了,也在社区看了很多帖子,依然没有什么头绪,不得已请假下各位大佬们
环境
- 2驱差速fishbot,EAI S2 雷达
- 树莓派4b 、ubuntu22.04桌面版、ros2 humb
- git clone 源码编译 ydlidar_ros2
已做的工作
1、按照教程,使用工具给雷达板刷好了固件
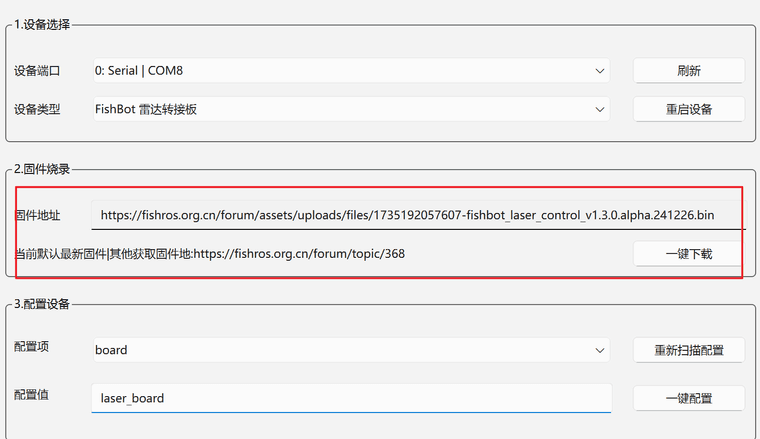
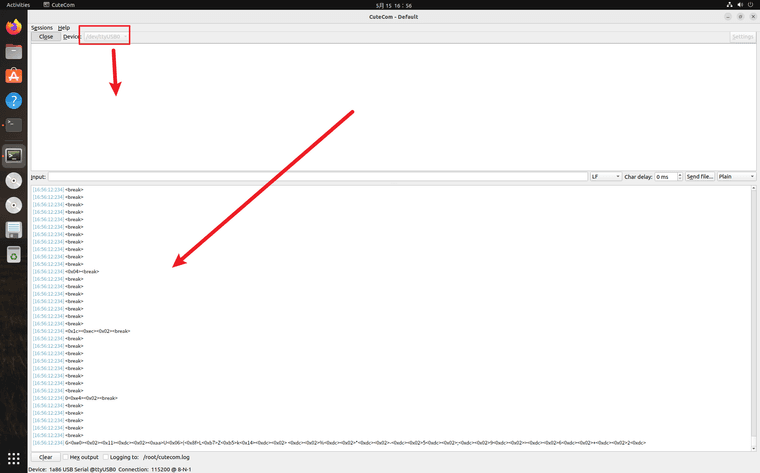
2、雷达转接板在刷好固件后,跳线帽切换了USB模式,并使用串口助手,验证了雷达转接板在115200波特率下,有二进制数据不断输出

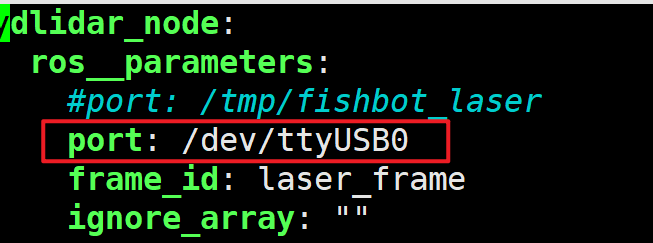
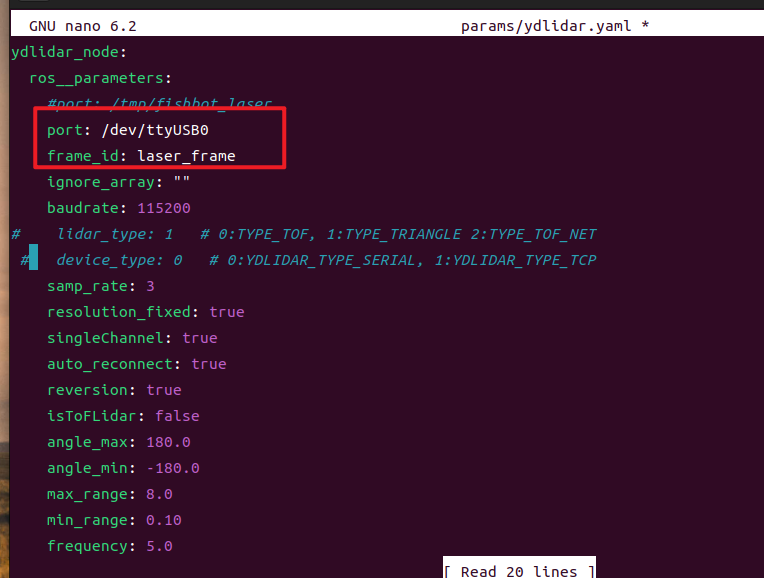
3、确认插上串口后,驱动正常,并修改yml配置文件为下面设备
/dev/ttyUSB0

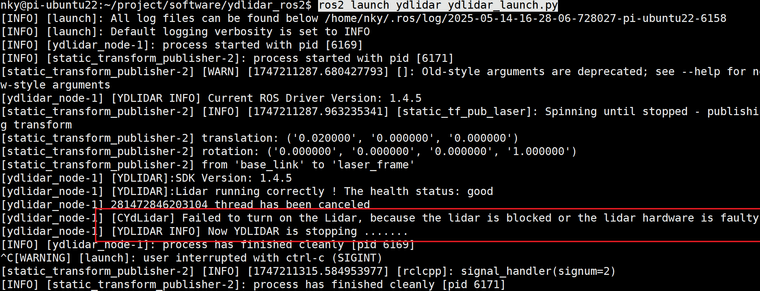
4、正确编译了雷达驱动并
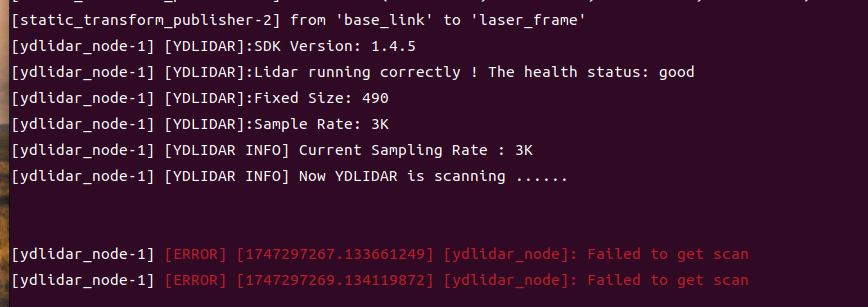
sudo chmod 666 /dev/ttyUSB0给予了权限,执行ros2 launch ydlidar ydlidar_launch.py失败,信息如下
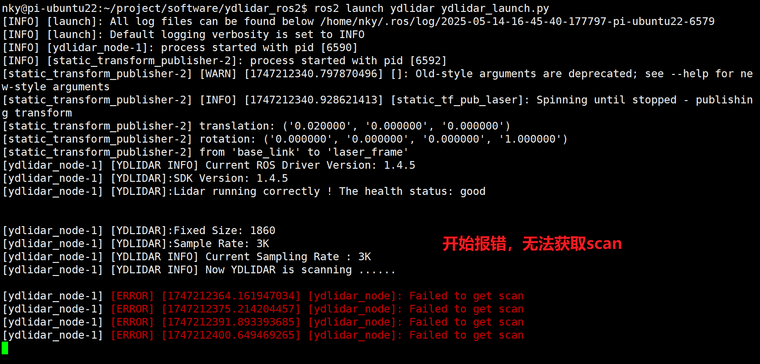
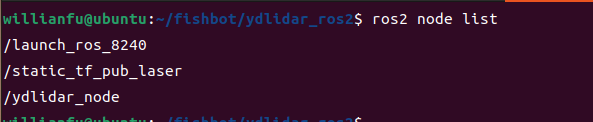
5、重试,插拔串口、反复操作,成功了一次,过十秒左右但是又开始报错
此时的topic
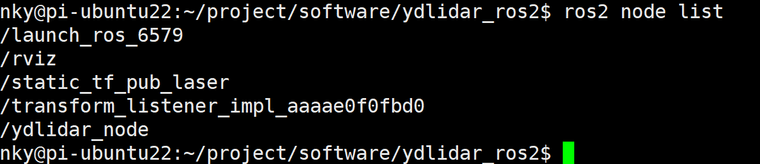
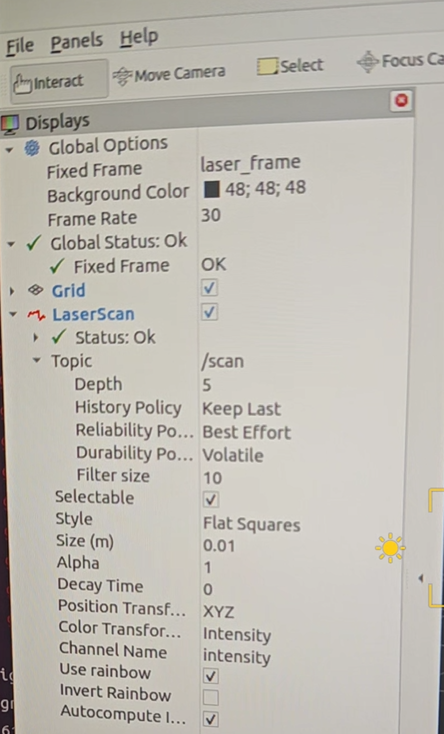
6、启动rviz2 ,配置好后也没有任何反应,画面里无雷达数据
遇到的问题总结
由于wifi的方式也试过了,也是这个问题,于是使用了usb串口直连,排除网络问题,仍然这样子
每次启动后一会儿就报错,rviz2无任何数据显示
[ydlidar_node-1] [ERROR] [1747213588.454829551] [ydlidar_node]: Failed to get scan由于使用树莓派,无法使用docker启动雷达建图案例,特此求助各位大佬。
进行第二轮尝试
使用树莓派无果,进行第二种方案尝试
- window11下在笔记本 Vmware 安装虚拟机ubuntu22.04
1、USB串口直连
已确保usb被正常扫描出来了,板子跳线帽插在了EN、USBT、USBR

使用github的
v1.0.0/fishbot雷达驱动,编辑了配置重新编译过
启动后,几秒钟开始报错
新开一个终端查看topic
rviz2配置完成无数据显示。。。
2、使用docker 走 WIFI 网络连接
配置虚拟机NAT模式端口映射 TCP+UDP (8889 -> 8889、8888 -> 8888),并使用同一局域网下的设备测试telnet能够连接到虚拟机内docker启动的8889端口
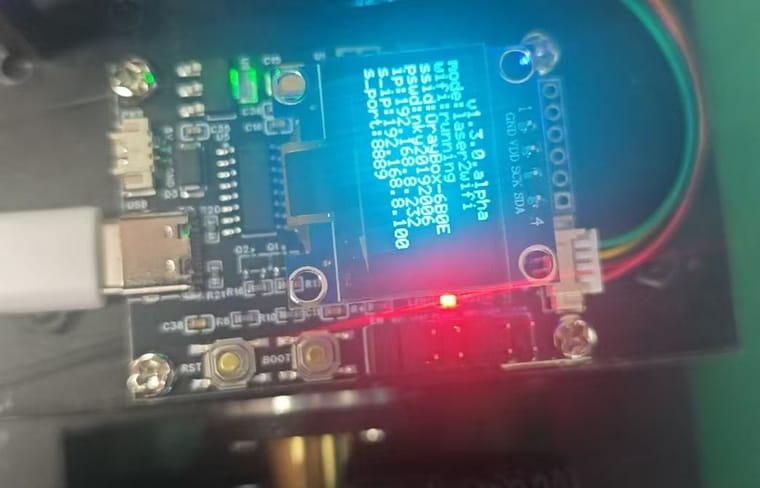
雷达板跳线帽插到WIFI模式
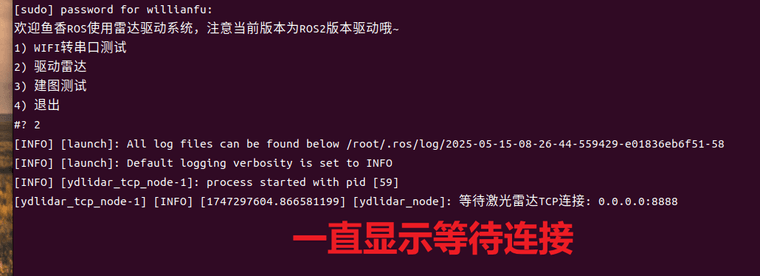
此时雷达板显示
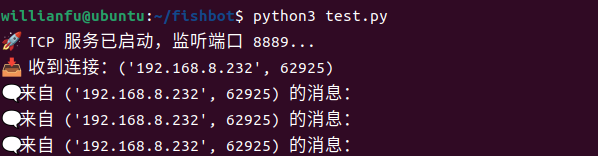
编写了python脚本在8889端口开启tcp服务器,能检测到雷达板自动连接上来
经过多轮尝试,没有走通雷达显示数据和建图,不知道问题出在哪里,希望大佬给予指引,感激不尽!
-
@2423542142 驱动问题,你用的哪个版本,走串口,数据就不会走esp上过了,所以不是雷达板和固件问题
驱动你用的哪个版本,注意修改配置,所以请提供你的雷达驱动用的哪一个,完整的配置是怎么样的,配置好后是否重新构建 -
@小鱼 用的github那个
v1.0.0/fishbot分支,帖子我补充了今天尝试的内容,配置完毕都删除了build、install 、log,然后重新colcon build -
@2423542142 加我微信,我远程看一眼
-
@小鱼 加了,您通过下
willianfu_ -
@2423542142 你先用cutecom看看串口有没有数据
-
@小鱼 串口有数据在跑
-
@2423542142 好的