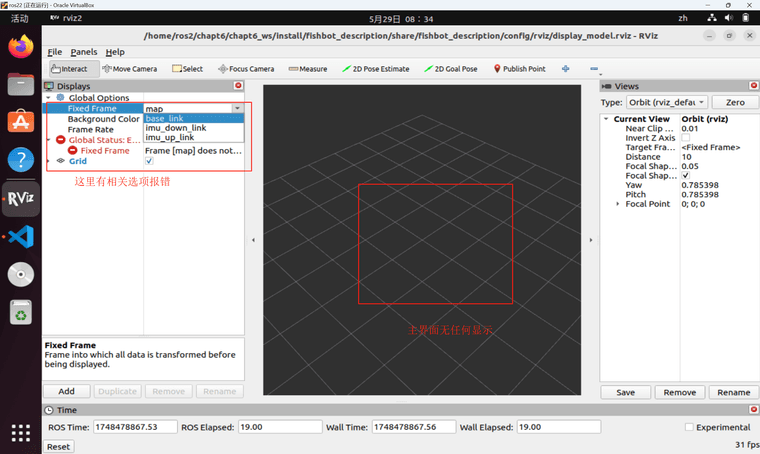
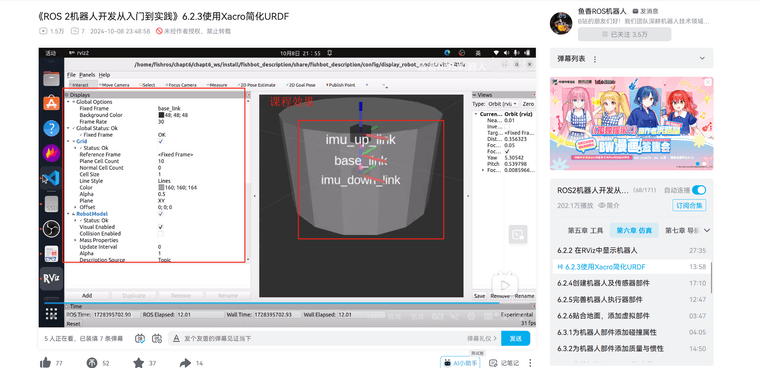
老师,这里对标新版课程6.2.3,但是用仿真出来没显示坐标系
-
老师,这里构建完成之后,代码部分是照着视频原封不动敲的,然后一运行仿真,坐标系和那个机器人一个都没有,课程前面的那个包也是安装了的
-
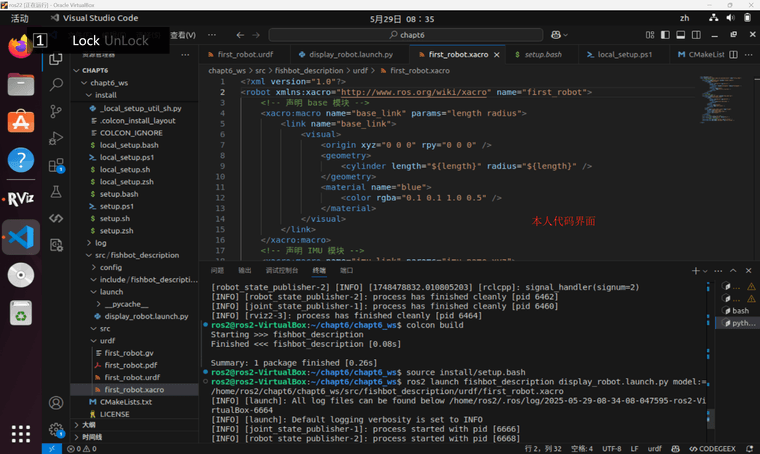
@2586375669 这里是代码部分,老师
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="first_robot">
<!-- 声明 base 模块 -->
<xacro:macro name="base_link" params="length radius">
<link name="base_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="${length}" radius="${length}" />
</geometry>
<material name="blue">
<color rgba="0.1 0.1 1.0 0.5" />
</material>
</visual>
</link>
</xacro:macro>
<!-- 声明 IMU 模块 -->
<xacro:macro name="imu_link" params="imu_name xyz">
<link name="${imu_name}_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.02 0.02 0.02" />
</geometry>
</visual>
<material name="black">
<color rgba="0 0 0 0.5" />
</material>
</link>
<joint name="${imu_name}_joint" type="fixed">
<parent link="base_link" />
<child link="${imu_name}_link" />
<origin xyz="${xyz}" />
</joint>
</xacro:macro>
<!-- 传递参数调用 base_link 模块 -->
<xacro:base_link length="0.12" radius="0.1" />
<!-- 传递参数调用 imu 模块 -->
<xacro:imu_link imu_name="imu_up" xyz="0 0 0.02" />
<xacro:imu_link imu_name="imu_down" xyz="0 0 -0.02" /></robot>
-
@2586375669 RotbotModel模块没添加
-
@luqixuan 在 老师,这里对标新版课程6.2.3,但是用仿真出来没显示坐标系 中说:
RotbotModel模块没添加
老师,
该咋添加啊 -
@2586375669

左下角add添加 -
@luqixuan 添加了还是没有,而且我也木有显示坐标系的内容
-
@2586375669 description file中有添加first_robot.urdf文件吗
-
@luqixuan 有的,加进去机器人的程序