机械臂在gazebo里面仿真,rviz里面的姿态和gazebo不一样(ros2 humble,gazebo classic)
-
标题:机械臂在gazebo里面仿真,rviz里面的姿态和gazebo不一样(ros2 humble,gazebo classic)
背景(可选):
我目前正在学习通过ros2驱动机械臂实现抓取的功能,目前的阶段是想实现在gazebo里面进行仿真
问题描述:
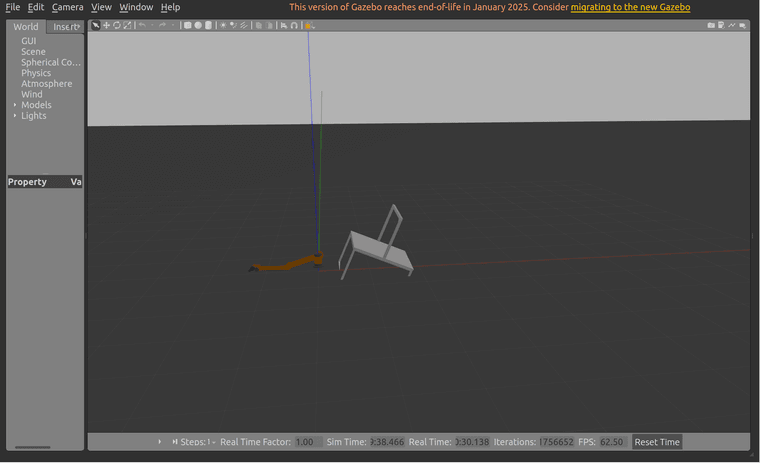
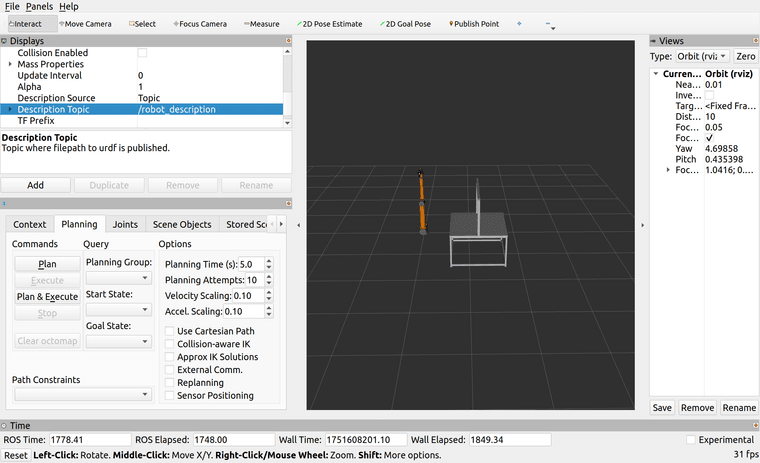
我想要在gazebo里面进行仿真,实现机械臂末端有夹爪能够夹取东西,但是目前在rivz里面显示的效果和在gazebo里面是不一样的,问题就是gazebo显示的画面里,桌子是一直抖动的状态,机械臂在gazebo里面也是瘫软无力的,需要怎么解决具体细节和上下文:
尝试过的解决方法:
具体的就是修改了urdf文件,修改了桌子的惯性参数,但是也不确定自己修改的是不是对的,问过老师,老师说我需要添加controller,但是也不知道做,没有一个大体的思路