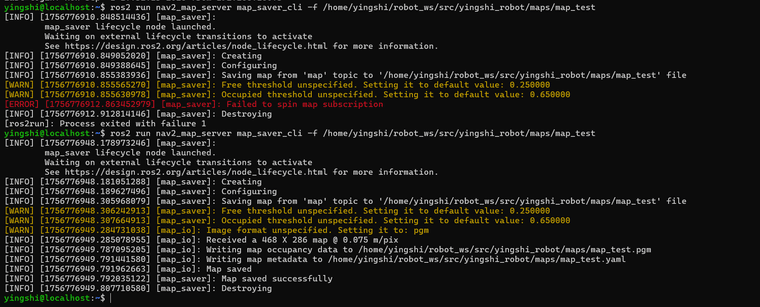
ros2 run nav2_map_server map_saver_cli -f 会有建图失败的问题
-
yingshi@localhost:~$ ros2 run nav2_map_server map_saver_cli -f map_test
[INFO] [1756779170.449145940] [map_saver]:
map_saver lifecycle node launched.
Waiting on external lifecycle transitions to activate
See https://design.ros2.org/articles/node_lifecycle.html for more information.
[INFO] [1756779170.453766981] [map_saver]: Creating
[INFO] [1756779170.454343523] [map_saver]: Configuring
[INFO] [1756779170.548227940] [map_saver]: Saving map from 'map' topic to '/home/yingshi/robot_ws/src/yingshi_robot/maps/map_test' file
[WARN] [1756779170.549477815] [map_saver]: Free threshold unspecified. Setting it to default value: 0.250000
[WARN] [1756779170.556668606] [map_saver]: Occupied threshold unspecified. Setting it to default value: 0.650000
[ERROR] [1756779172.643780482] [map_saver]: Failed to spin map subscription
[INFO] [1756779172.656481107] [map_saver]: Destroying
[ros2run]: Process exited with failure 1