gazebo接入ros2_control
-
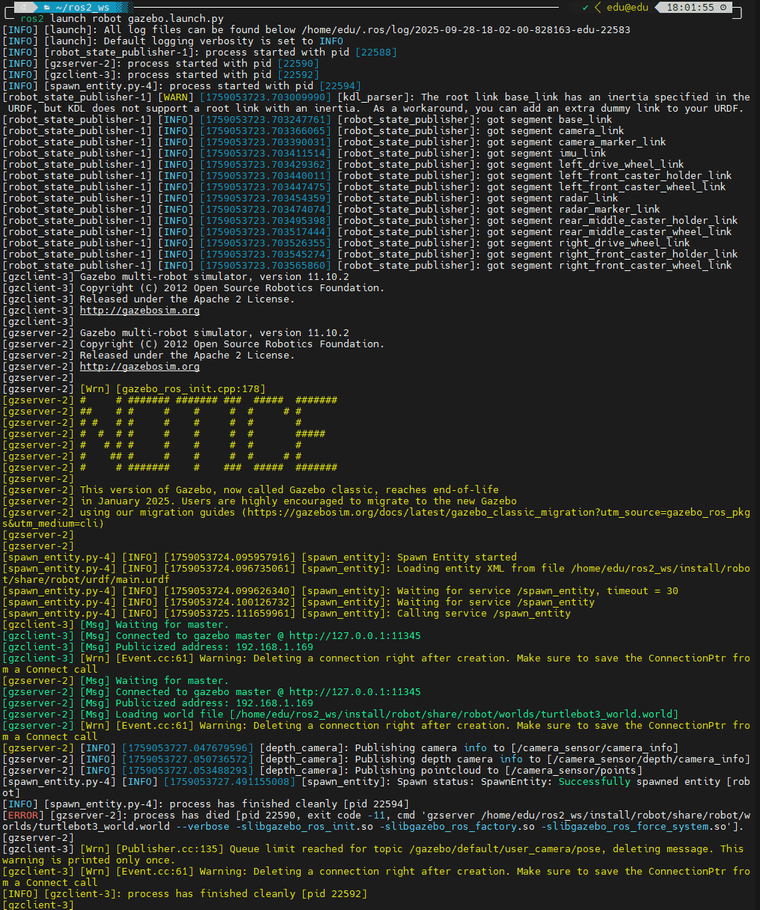
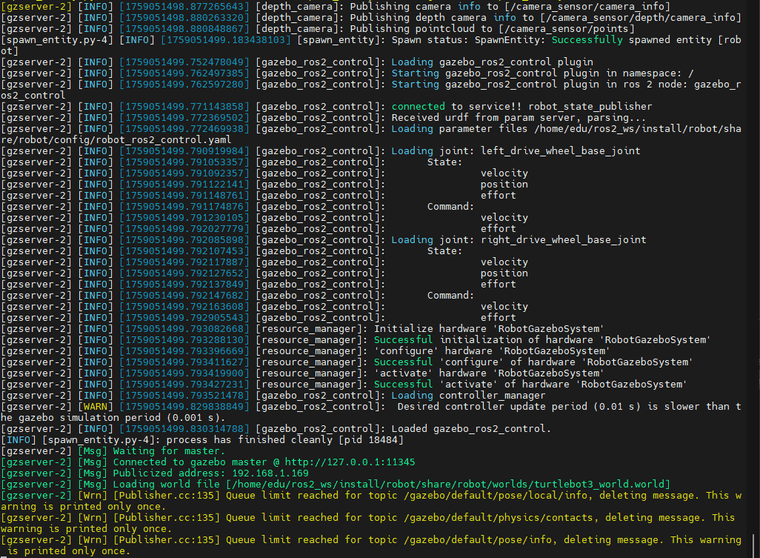
ros2_humble UBuntu 2022.04.5 在这之前已经完成第六章6.5.1的全部内容,有所不同的是我是自己在solidworks中建的模,并使用插件导出urdf,并加载turtlebot3 的世界文件。在xacro中添加了ros2_control插件代码(以及config/robot_ros2_control.yaml)后启动,有如下输出
 ros2_control.xacro:
ros2_control.xacro: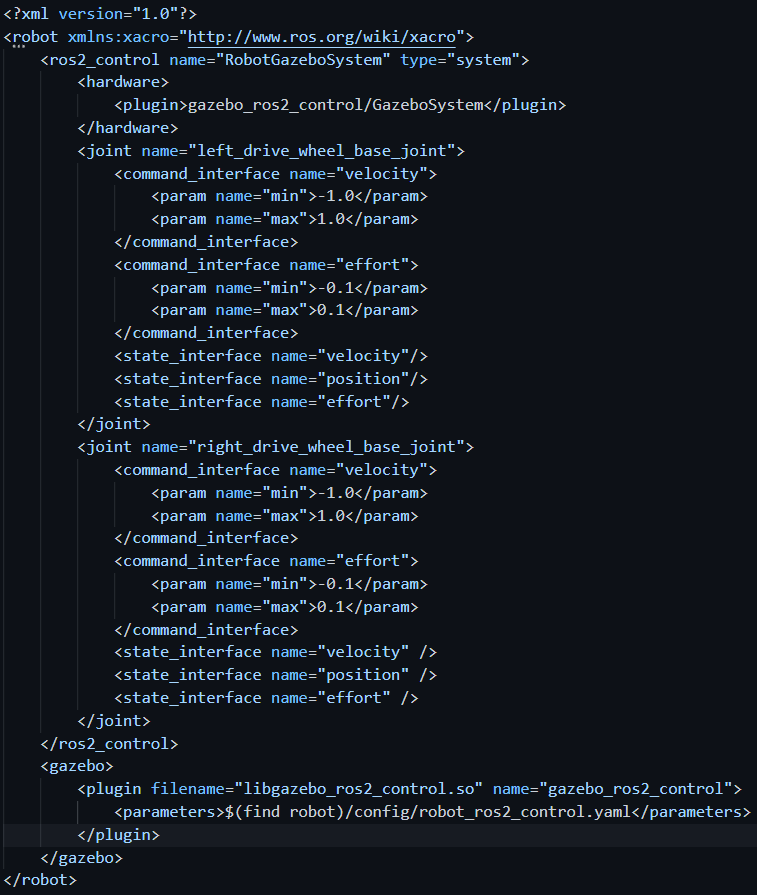 robot_ros2_control.yaml:
robot_ros2_control.yaml: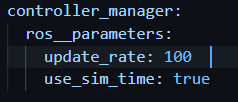 gazebo.launch.py:
gazebo.launch.py: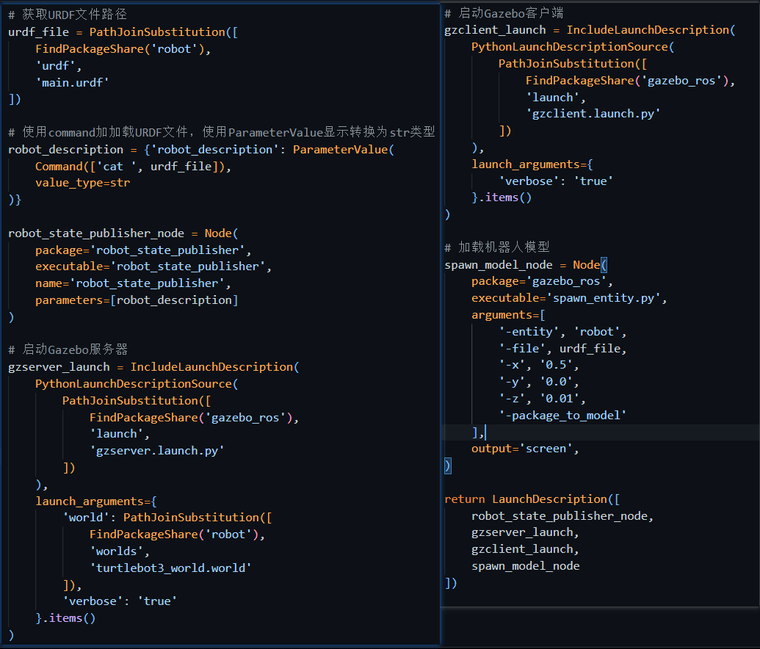 .在解决了没有启动robot_state_publisher节点;排除了yaml内容,以及世界文件加载错误后,还是有以上问题。但是在依次小尝试,在main.xacro注释了最后一行文件引入后
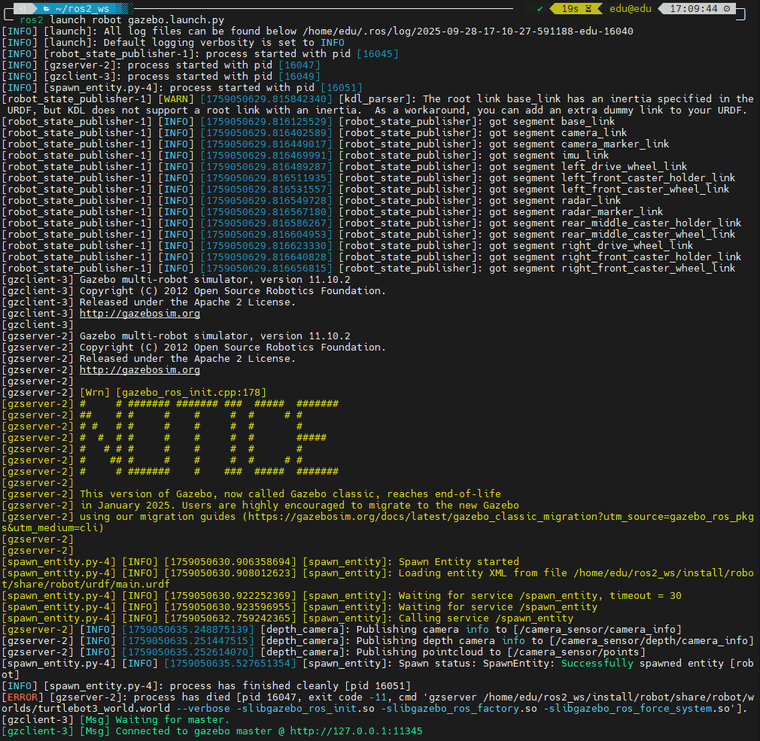
.在解决了没有启动robot_state_publisher节点;排除了yaml内容,以及世界文件加载错误后,还是有以上问题。但是在依次小尝试,在main.xacro注释了最后一行文件引入后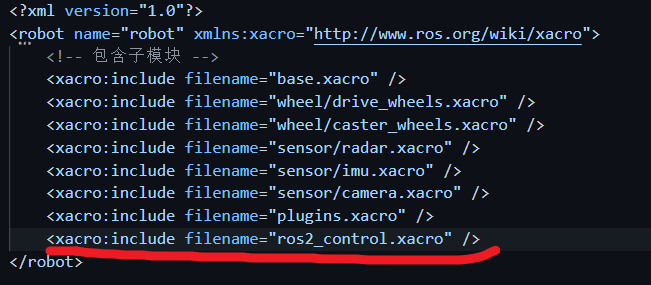 重新编译,启动、取消注释、重新编译、启动后有如下输出
重新编译,启动、取消注释、重新编译、启动后有如下输出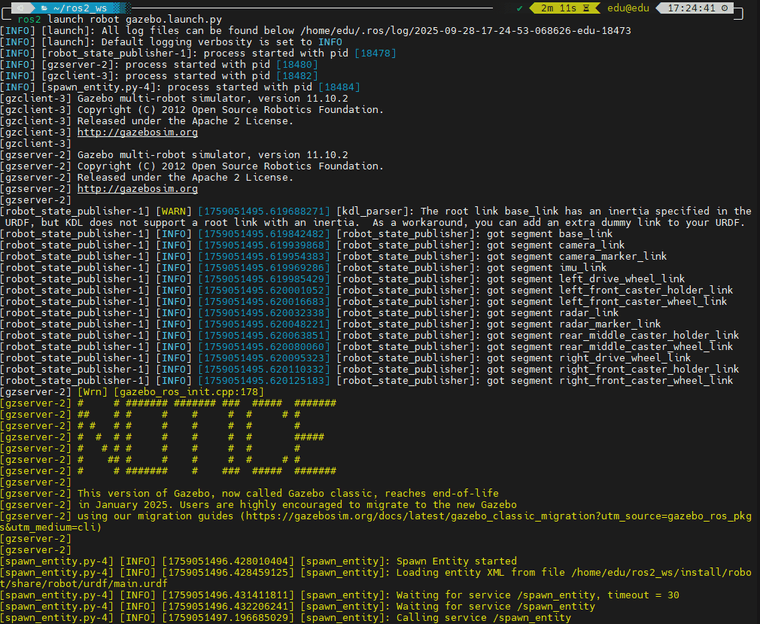
 虽然问题已近解决,但是我仍然不知道问题在哪里
虽然问题已近解决,但是我仍然不知道问题在哪里 -
@凄凉的泪水 在删除共享目录install中的所有文件后 重新构建后在启动仿真环境后失败: