一键安装melodic失败
-
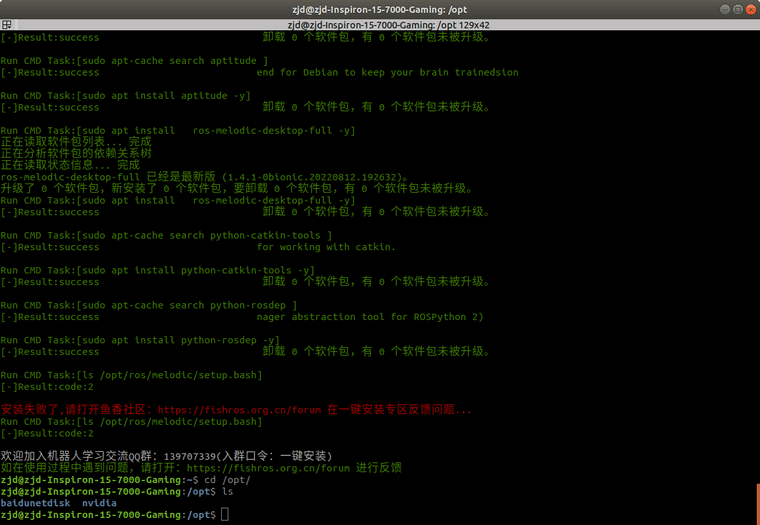
zjd@zjd-Inspiron-15-7000-Gaming:~$ wget http://fishros.com/install -O fishros && . fishros --2022-10-18 14:23:31-- http://fishros.com/install 正在解析主机 fishros.com (fishros.com)... 139.9.131.171 正在连接 fishros.com (fishros.com)|139.9.131.171|:80... 已连接。 已发出 HTTP 请求,正在等待回应... 301 Moved Permanently 位置:http://fishros.com/install/ [跟随至新的 URL] --2022-10-18 14:23:31-- http://fishros.com/install/ 再次使用存在的到 fishros.com:80 的连接。 已发出 HTTP 请求,正在等待回应... 200 OK 长度: 582 [application/octet-stream] 正在保存至: “fishros” fishros 100%[=======================================================>] 582 --.-KB/s 用时 0s 2022-10-18 14:23:31 (61.1 MB/s) - 已保存 “fishros” [582/582]) 正在读取软件包列表... 完成 正在分析软件包的依赖关系树 正在读取状态信息... 完成 python3-yaml 已经是最新版 (3.12-1build2)。 python3-distro 已经是最新版 (1.0.1-2)。 升级了 0 个软件包,新安装了 0 个软件包,要卸载 0 个软件包,有 0 个软件包未被升级。 --2022-10-18 14:23:32-- http://fishros.com/install/install1s/tools/base.py 正在解析主机 fishros.com (fishros.com)... 139.9.131.171 正在连接 fishros.com (fishros.com)|139.9.131.171|:80... 已连接。 已发出 HTTP 请求,正在等待回应... 200 OK 长度: 41972 (41K) [application/octet-stream] 正在保存至: “/tmp/fishinstall/tools/base.py” /tmp/fishinstall/tools/base.py 100%[=======================================================>] 40.99K --.-KB/s 用时 0.02s 2022-10-18 14:23:32 (1.63 MB/s) - 已保存 “/tmp/fishinstall/tools/base.py” [41972/41972]) Run CMD Task:[dpkg --print-architecture] [-]Result:success 基础检查通过... =============================================================================== ======欢迎使用一键安装工具,人生苦短,三省吾身,省时省力省心!======= ======一键安装已开源,请放心使用:https://github.com/fishros/install======= =============================================================================== .-~~~~~~~~~-._ _.-~~~~~~~~~-. __.' ~. .~ `.__ .'// 开卷有益 \./ 书山有路 \ `. .'// 可以多看看小鱼的文章 | 关注公众号鱼香ROS \ `. .'// .-~"~~~~-._ | _,-~~~~"~-. \`. .'//.-" `-. | .-' "-.\`. .'//______.============-.. \ | / ..-============.______\`. .'______________________________\|/______________________________` ---------------------------------------------------------------------- RUN Choose Task:[请输入括号内的数字] ---众多工具,等君来用--- [1]:一键安装:ROS(支持ROS和ROS2,树莓派Jetson) [11]:一键安装:ROS+Docker(支持所有版本ROS/ROS2) [2]:一键安装:github桌面版(小鱼常用的github客户端) [3]:一键配置:rosdep(小鱼的rosdepc,又快又好用) [4]:一键配置:ROS环境(快速更新ROS环境设置,自动生成环境选择) [5]:一键配置:系统源(更换系统源,支持全版本Ubuntu系统) [6]:一键安装:nodejs [7]:一键安装:VsCode开发工具 [8]:一键安装:Docker [9]:一键安装:Cartographer(内测版v0.1) [10]:一键安装:微信(可以在Linux上使用的微信) [77]:测试模式:运行自定义工具测试 [0]:quit 请输入[]内的数字以选择:1 --2022-10-18 14:23:37-- http://fishros.com/install/install1s/tools/tool_install_ros.py 正在解析主机 fishros.com (fishros.com)... 139.9.131.171 正在连接 fishros.com (fishros.com)|139.9.131.171|:80... 已连接。 已发出 HTTP 请求,正在等待回应... 200 OK 长度: 19050 (19K) [application/octet-stream] 正在保存至: “/tmp/fishinstall/tools/tool_install_ros.py” /tmp/fishinstall/tools/tool_inst 100%[=======================================================>] 18.60K --.-KB/s 用时 0.01s 2022-10-18 14:23:37 (1.77 MB/s) - 已保存 “/tmp/fishinstall/tools/tool_install_ros.py” [19050/19050]) --2022-10-18 14:23:37-- http://fishros.com/install/install1s/tools/tool_config_rosenv.py 正在解析主机 fishros.com (fishros.com)... 139.9.131.171 正在连接 fishros.com (fishros.com)|139.9.131.171|:80... 已连接。 已发出 HTTP 请求,正在等待回应... 200 OK 长度: 2457 (2.4K) [application/octet-stream] 正在保存至: “/tmp/fishinstall/tools/tool_config_rosenv.py” /tmp/fishinstall/tools/tool_conf 100%[=======================================================>] 2.40K --.-KB/s 用时 0s 2022-10-18 14:23:37 (405 MB/s) - 已保存 “/tmp/fishinstall/tools/tool_config_rosenv.py” [2457/2457]) --2022-10-18 14:23:37-- http://fishros.com/install/install1s/tools/tool_config_system_source.py 正在解析主机 fishros.com (fishros.com)... 139.9.131.171 正在连接 fishros.com (fishros.com)|139.9.131.171|:80... 已连接。 已发出 HTTP 请求,正在等待回应... 200 OK 长度: 7511 (7.3K) [application/octet-stream] 正在保存至: “/tmp/fishinstall/tools/tool_config_system_source.py” /tmp/fishinstall/tools/tool_conf 100%[=======================================================>] 7.33K --.-KB/s 用时 0.003s 2022-10-18 14:23:37 (2.84 MB/s) - 已保存 “/tmp/fishinstall/tools/tool_config_system_source.py” [7511/7511]) 欢迎使用一键安装ROS和ROS2,支持树莓派Jetson,本工具由作者小鱼提供 欢迎使用ROS开箱子工具,本工具由[鱼香ROS]小鱼贡献.. 小鱼:检测当前系统ubuntu18.04:bionic 支持一键安装ROS =========接下来这一步很重要,如果不知道怎么选请选择1======== RUN Choose Task:[请输入括号内的数字] 首次安装一定要换源并清理三方源,换源!!!系统默认国外源容易失败!! [1]:更换系统源再继续安装 [2]:不更换继续安装 [0]:quit 请输入[]内的数字以选择:1 欢迎使用一键换源工具,本工具由[鱼香ROS]小鱼贡献.. RUN Choose Task:[请输入括号内的数字] 请选择换源方式,如果不知道选什么请选2 [1]:仅更换系统源 [2]:更换系统源并清理第三方源 [0]:quit 请输入[]内的数字以选择:2 Run CMD Task:[sudo rm -rf /etc/apt/sources.list] [-]Result:success 删除一个资源文件 Run CMD Task:[sudo rm -rf /etc/apt/sources.list.d] [-]Result:success Run CMD Task:[sudo mkdir -p /etc/apt/sources.list.d] [-]Result:success Run CMD Task:[dpkg --print-architecture] [-]Result:success 检测到当前系统架构为[amd64:bionic],正在为你更换对应源.. 替换完成,尝试第一次更新.... Run CMD Task:[sudo apt update] [-]Result:success bionic-security InReleasee 搞定了,不信你看,累死宝宝了,还不快去给小鱼点个赞~ ['命中:1 https://mirrors.ustc.edu.cn/ubuntu bionic InRelease', '命中:2 https://mirrors.ustc.edu.cn/ubuntu bionic-updates InRelease', '命中:3 https://mirrors.ustc.edu.cn/ubuntu bionic-backports InRelease', '命中:4 https://mirrors.ustc.edu.cn/ubuntu bionic-security InRelease', '正在读取软件包列表...', '正在分析软件包的依赖关系树...', '正在读取状态信息...', '所有软件包均为最新。', ''] 镜像修复完成..... Run CMD Task:[sudo apt update] [-]Result:success bionic-security InReleasee Run CMD Task:[sudo apt-cache search curl ] [|]ros-melodic-resource-retriever - This package retrieves data from url-format files such as http://, ftp://, package:// file://[-]Result:success Run CMD Task:[sudo apt install curl -y] [-]Result:success 卸载 0 个软件包,有 0 个软件包未被升级。 Run CMD Task:[sudo apt-cache search gnupg2 ] [-]Result:success eplacement (dummy transitional package) Run CMD Task:[sudo apt install gnupg2 -y] [-]Result:success 卸载 0 个软件包,有 0 个软件包未被升级。 Run CMD Task:[curl -s https://gitee.com/ohhuo/rosdistro/raw/master/ros.asc | sudo apt-key add -] [-]Result:success Run CMD Task:[dpkg --print-architecture] [-]Result:success 根据您的系统,为您推荐安装源为['http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/', 'http://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu/'] Run CMD Task:[sudo apt update] [-]Result:success cn/ros/ubuntu bionic/main amd64 Packages [797 kB] Run CMD Task:[sudo apt-cache search ros-base ] [/]ros-melodic-end-effector - End-Effector package: provides a ROS-based set of standard interfaces to command robotics end-effec[\]ros-melodic-ros-base - A metapackage which extends ros_core and includes other basic non-robot tools like actionlib, dynamic r[-]Result:success xtends 'ros_core' and includes other basic functionalities like tf2 and urdf. 恭喜,成功添加ROS源,接下来可以使用apt安装ROS或者使用[1]一键安装ROS安装! Run CMD Task:[sudo apt-cache search ros-base ] [/]ros-melodic-end-effector - End-Effector package: provides a ROS-based set of standard interfaces to command robotics end-effec[\]ros-melodic-ros-base - A metapackage which extends ros_core and includes other basic non-robot tools like actionlib, dynamic r[-]Result:success xtends 'ros_core' and includes other basic functionalities like tf2 and urdf. RUN Choose Task:[请输入括号内的数字] 请选择你要安装的ROS版本名称(请注意ROS1和ROS2区别): [1]:melodic(ROS1) [2]:bouncy(ROS2) [3]:crystal(ROS2) [4]:dashing(ROS2) [5]:eloquent(ROS2) [0]:quit 请输入[]内的数字以选择:1 RUN Choose Task:[请输入括号内的数字] 请选择安装的具体版本(如果不知道怎么选,请选1桌面版): [1]:melodic(ROS1)桌面版 [2]:melodic(ROS1)基础版(小) [0]:quit 请输入[]内的数字以选择:1 Run CMD Task:[sudo apt-cache search aptitude ] [-]Result:success end for Debian to keep your brain trainedsion Run CMD Task:[sudo apt install aptitude -y] [-]Result:success 卸载 0 个软件包,有 0 个软件包未被升级。 Run CMD Task:[sudo apt-cache search aptitude ] [-]Result:success end for Debian to keep your brain trainedsion Run CMD Task:[sudo apt install aptitude -y] [-]Result:success 卸载 0 个软件包,有 0 个软件包未被升级。 Run CMD Task:[sudo apt install ros-melodic-desktop-full -y] 正在读取软件包列表... 完成 正在分析软件包的依赖关系树 正在读取状态信息... 完成 ros-melodic-desktop-full 已经是最新版 (1.4.1-0bionic.20220812.192632)。 升级了 0 个软件包,新安装了 0 个软件包,要卸载 0 个软件包,有 0 个软件包未被升级。 Run CMD Task:[sudo apt install ros-melodic-desktop-full -y] [-]Result:success 卸载 0 个软件包,有 0 个软件包未被升级。 Run CMD Task:[sudo apt-cache search python-catkin-tools ] [-]Result:success for working with catkin. Run CMD Task:[sudo apt install python-catkin-tools -y] [-]Result:success 卸载 0 个软件包,有 0 个软件包未被升级。 Run CMD Task:[sudo apt-cache search python-rosdep ] [-]Result:success nager abstraction tool for ROSPython 2) Run CMD Task:[sudo apt install python-rosdep -y] [-]Result:success 卸载 0 个软件包,有 0 个软件包未被升级。 Run CMD Task:[ls /opt/ros/melodic/setup.bash] [-]Result:code:2 安装失败了,请打开鱼香社区:https://fishros.org.cn/forum 在一键安装专区反馈问题... Run CMD Task:[ls /opt/ros/melodic/setup.bash] [-]Result:code:2 欢迎加入机器人学习交流QQ群:139707339(入群口令:一键安装) 如在使用过程中遇到问题,请打开:https://fishros.org.cn/forum 进行反馈 -
ubuntu 18.04 安装ros-melodic
在ls /opt/ros/melodic/setup.bash步骤出现code2失败
-
在/opt中没有ros文件夹
-
@MoveOn 看日志显示陈工了,比较奇怪,你先手动卸载下再安装吧
@MoveOn 在 一键安装melodic失败 中说:
Run CMD Task:[sudo apt install ros-melodic-desktop-full -y]
正在读取软件包列表... 完成
正在分析软件包的依赖关系树
正在读取状态信息... 完成
ros-melodic-desktop-full 已经是最新版 (1.4.1-0bionic.20220812.192632)。
升级了 0 个软件包,新安装了 0 个软件包,要卸载 0 个软件包,有 0 个软件包未被升级。
Run CMD Task:[sudo apt install ros-melodic-desktop-full -y]