嵌入式RTOS与ROS2的结合:Micro-ROS
-
- 推荐语:Micro-ROS 遵循ROS 2 架构,并利用其中间件可插拔性来使用针对微控制器进行了优化的DDS-XRCE。
- 地址:https://micro.ros.org/docs/tutorials/core/overview/
介绍
功能和架构
Micro-ROS 提供了七项关键功能,可以在基于微控制器的机器人项目中使用:
 支持所有主要 ROS 概念的微控制器优化客户端 API
支持所有主要 ROS 概念的微控制器优化客户端 API
与 ROS 2 无缝集成
极度资源受限但灵活的中间件
通用构建系统支持多 RTOS
充满活力的社区和生态系统
长期可维护性和互操作性分层和模块化架构
Micro-ROS 遵循ROS 2 架构,并利用其中间件可插拔性来使用针对微控制器进行了优化的DDS-XRCE。此外,它使用基于 POSIX 的 RTOS(FreeRTOS、Zephyr 或 NuttX)而不是 Linux。
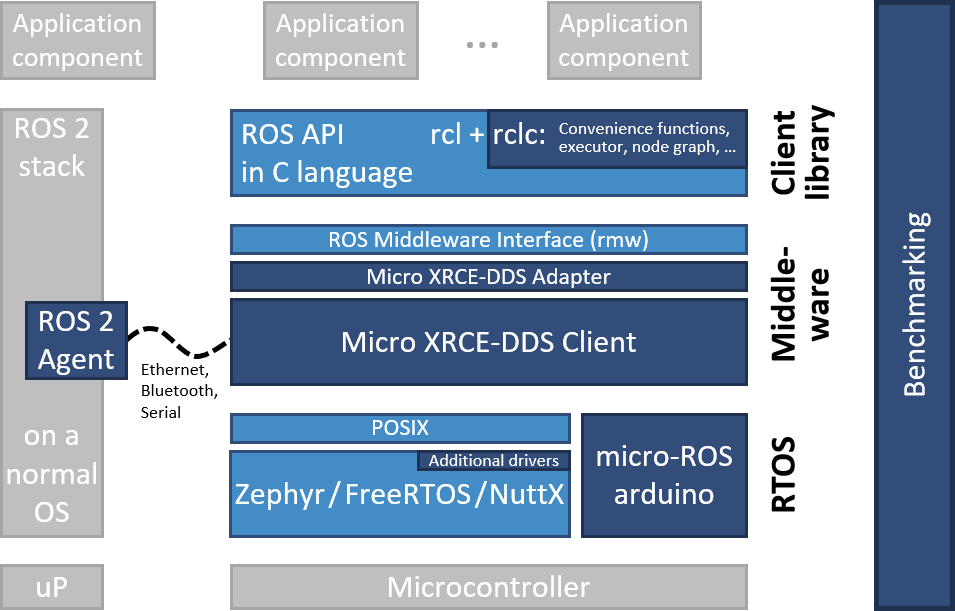
深蓝色组件专为 micro-ROS 开发。浅蓝色组件取自标准 ROS 2 堆栈。我们寻求为 ROS 2 主线代码库贡献尽可能多的代码。