开放机器人控制软件Orocos
-
- 推荐语:Orocos 是一个用于高级机器和机器人控制,可移植的C++ 库。
- 地址:https://docs.orocos.org/index.html
Orocos
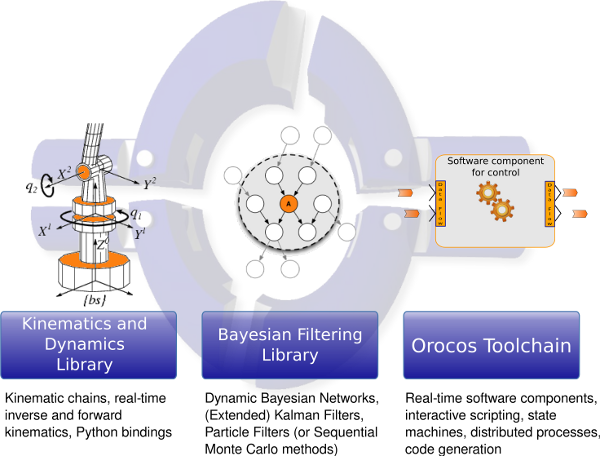
多年来,Orocos 已成为用于开发机器人软件的中间件和工具的大型项目。该项目的主要部分是实时工具链 ( RTT ) 和 Orocos 组件库 ( OCL )。
- Orocos Real-Time Toolkit (RTT):一个组件框架,允许我们用 C++ 编写实时组件。
- Orocos 组件库 (OCL):启动应用程序并在运行时与之交互的必要组件
- Orocos Log4cpp (log4cpp):Log4cpp 库的补丁版本,用于灵活地记录到文件、系统日志、IDSA 和其他目标。