我按照仿真篇的教程编写了launch文件,改了一下名字,然后gazebo打开了,但是里面没有加载出urdf模型,没有报错,只有一个警告
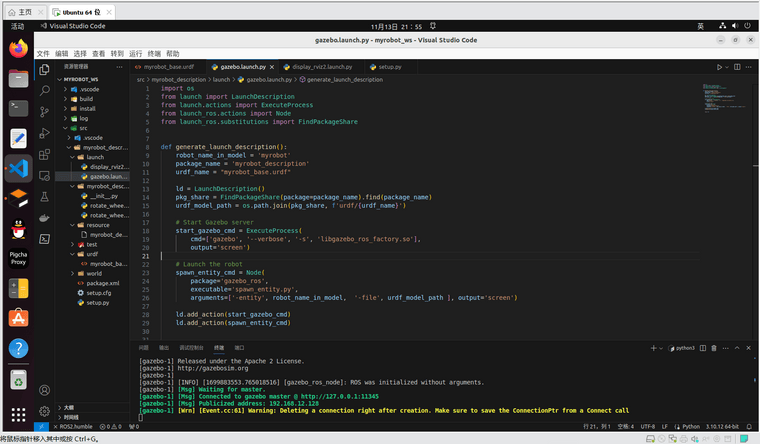

launch文件如下
import os
from launch import LaunchDescription
from launch.actions import ExecuteProcess
from launch_ros.actions import Node
from launch_ros.substitutions import FindPackageShare
def generate_launch_description():
robot_name_in_model = 'myrobot'
package_name = 'myrobot_description'
urdf_name = "myrobot_base.urdf"
ld = LaunchDescription()
pkg_share = FindPackageShare(package=package_name).find(package_name)
urdf_model_path = os.path.join(pkg_share, f'urdf/{urdf_name}')
# Start Gazebo server
start_gazebo_cmd = ExecuteProcess(
cmd=['gazebo', '--verbose', '-s', 'libgazebo_ros_factory.so'],
output='screen')
# Launch the robot
spawn_entity_cmd = Node(
package='gazebo_ros',
executable='spawn_entity.py',
arguments=['-entity', robot_name_in_model, '-file', urdf_model_path ], output='screen')
ld.add_action(start_gazebo_cmd)
ld.add_action(spawn_entity_cmd)
return ld
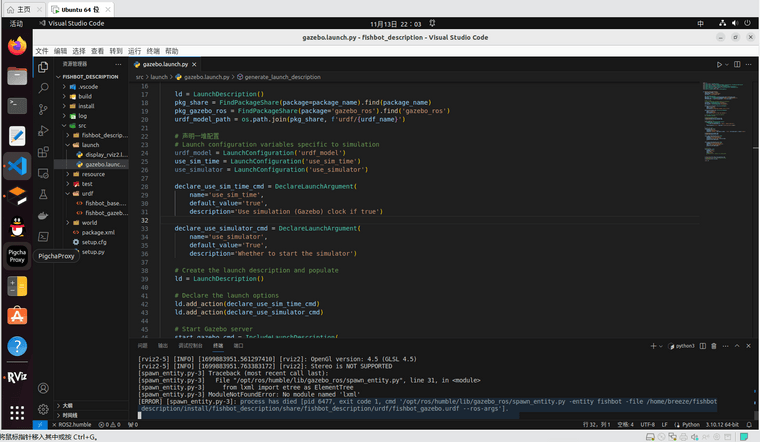
然后我下载鱼香ros里的文件,编译运行后也只打开了世界,没有加载出模型,有报错