里程计与导航错误
-
回复: [FishBot教程]7. FishBot-Nav2导航测试
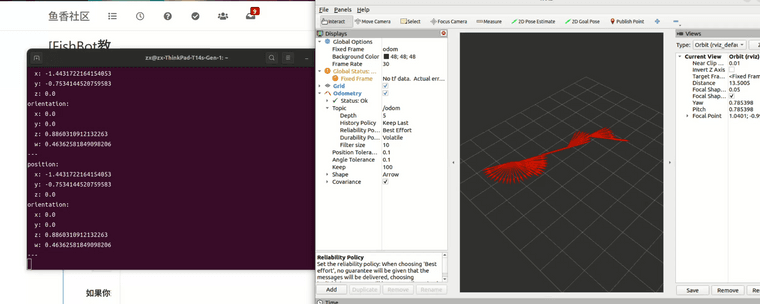
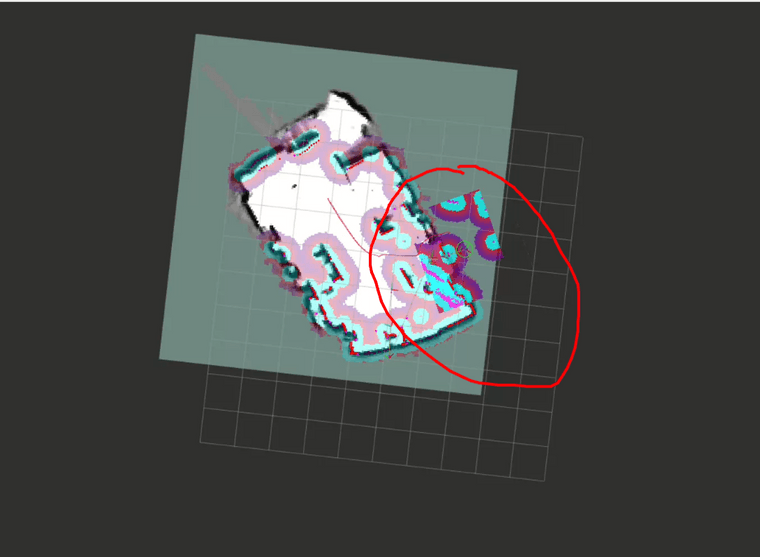

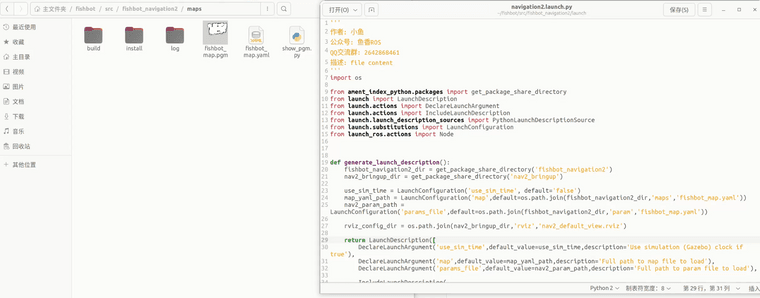
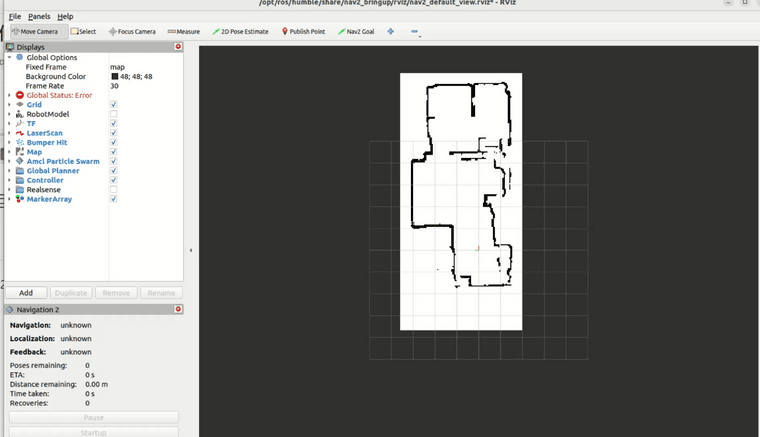
控制机器人跑一圈回到原点之后,此时的x,y非零了是什么原因,而且有时在rviz2中里程计原点不在网格内,而在很远处,后续的建图、导航也无法实现。而且在导航的时候并非按照导入的地图走,而是一边导航一边继续构图,按照社区回复中修改launch文件后地图成为默认地图了
回复: [FishBot教程]7. FishBot-Nav2导航测试
控制机器人跑一圈回到原点之后,此时的x,y非零了是什么原因,而且有时在rviz2中里程计原点不在网格内,而在很远处,后续的建图、导航也无法实现。而且在导航的时候并非按照导入的地图走,而是一边导航一边继续构图,按照社区回复中修改launch文件后地图成为默认地图了