fishbot建完图导航不了
-
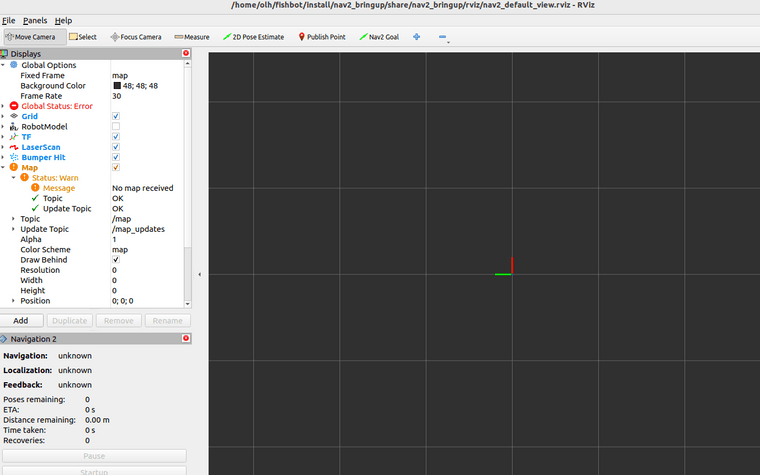
fishbot导航已经建好图了,把地图文件也换了,启动了底盘和雷达,同时启动了bringup,也把launch文件的use_simtime改为false但是运行ros2 launch fishbot_navigation2 navigation2.launch.py时却没有地图出现
-
您遇到的问题可能涉及多个方面,以下是一些排查故障的步骤,可以帮助您确定问题所在:
-
检查地图文件:
- 确保地图文件(通常是
.yaml或.pgm格式)已经被正确加载到ROS 2环境中。 - 检查地图文件的路径是否正确,并且在
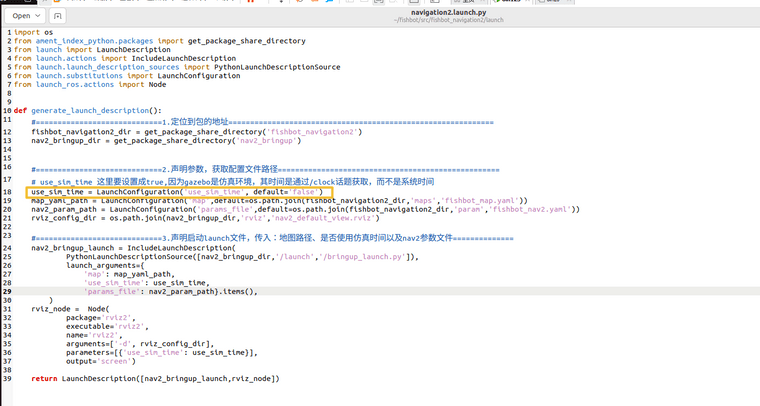
navigation2.launch.py启动文件中指向了正确的位置。
- 确保地图文件(通常是
-
检查传感器数据:
- 确保雷达(通常是激光雷达)正常工作,并正在发布传感器数据。
- 使用
ros2 topic list和ros2 topic echo命令检查雷达数据是否正在发布,并且数据看起来是正确的。
-
检查TF变换:
- 确保从雷达到机器人基座的TF变换被正确发布。您可以使用
ros2 run tf2_ros tf2_echo来检查这些变换。
- 确保从雷达到机器人基座的TF变换被正确发布。您可以使用
-
检查RViz:
- 使用RViz可视化工具来查看地图和机器人状态。在RViz中,添加
Map显示层来查看加载的地图。 - 确保RViz的配置文件是正确的,并且包含了必要的显示层。
- 使用RViz可视化工具来查看地图和机器人状态。在RViz中,添加
-
检查ROS 2参数:
- 使用
ros2 param list和ros2 param get命令来检查navigation2节点使用的参数。 - 特别注意
use_sim_time参数。虽然您已经将其改为false,但请确保其他与时间相关的参数也是正确的。
- 使用
-
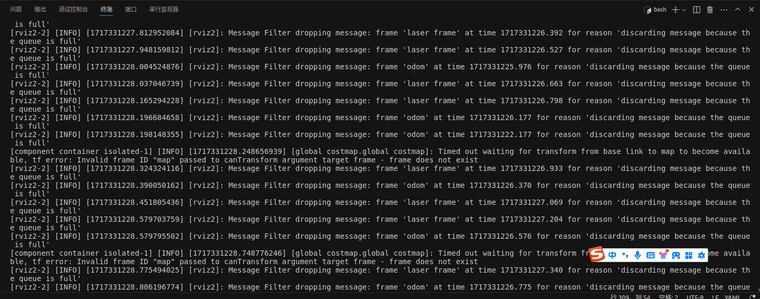
检查ROS 2日志:
- 查看ROS 2的日志输出,寻找可能的错误或警告信息。使用
ros2 launch时,通常会有输出信息显示在终端上。
- 查看ROS 2的日志输出,寻找可能的错误或警告信息。使用
-
检查
navigation2配置:- 确保
navigation2的YAML配置文件(如costmap_common_params.yaml,local_costmap_params.yaml,global_costmap_params.yaml等)中的参数配置正确。 - 检查是否有任何参数与您的硬件或环境不匹配。
- 确保
-
检查启动顺序:
- 确保您首先启动了机器人硬件的驱动程序(如底盘和雷达),然后再启动
navigation2节点。
- 确保您首先启动了机器人硬件的驱动程序(如底盘和雷达),然后再启动
-
检查ROS 2网络:
- 确保ROS 2节点之间的通信没有问题。使用
ros2 node list来查看当前运行的所有节点。
- 确保ROS 2节点之间的通信没有问题。使用
-
重新构建和清理:
- 有时候,重新构建您的ROS 2工作空间并清理构建缓存可以解决一些奇怪的问题。使用
colcon build来构建,使用colcon clean来清理。
- 有时候,重新构建您的ROS 2工作空间并清理构建缓存可以解决一些奇怪的问题。使用
如果上述步骤都不能解决问题,您可能需要更详细地检查
navigation2.launch.py文件,确保所有必要的组件都被正确启动,并且参数配置正确。同时,查阅Fishbot机器人的官方文档或社区论坛也可能提供有用的信息。
以上为生成回答,仅供参考~
-
-
-
你好!请问有什么需要我帮助你的吗?我会尽力回答你的问题或者提供帮助。请随时告诉我你的需求或者疑问,我会尽快回复你。
以上为生成回答,仅供参考~