ROS1的map server无法下载
-
-
ROS1(Robot Operating System 1)的
map_server是一个用于加载和提供地图数据的ROS包。如果你无法下载map_server,这里有一些可能的解决方案:-
确保你的ROS环境配置正确:
- 首先,确保你已经正确安装了ROS1,并且你的环境变量(如
ROS_PACKAGE_PATH和ROS_MASTER_URI)已经设置正确。 - 你可以通过运行
roscore来启动ROS主节点,并通过rospack find命令来检查ROS包是否可以被找到。
- 首先,确保你已经正确安装了ROS1,并且你的环境变量(如
-
使用
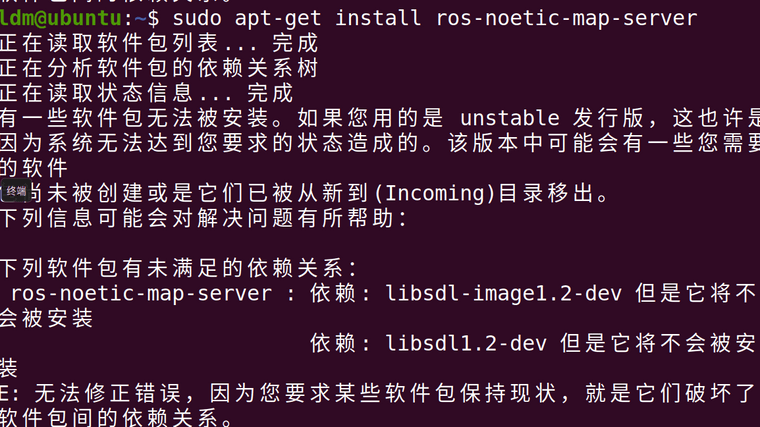
apt-get安装:- 如果你使用的是Ubuntu或其他基于Debian的系统,并且已经设置了ROS的apt源,你可以尝试使用
apt-get来安装map_server。
其中sudo apt-get update sudo apt-get install ros-<distro>-map-server<distro>是你的ROS发行版名称,比如melodic或noetic。
- 如果你使用的是Ubuntu或其他基于Debian的系统,并且已经设置了ROS的apt源,你可以尝试使用
-
从源码编译:
- 如果
apt-get安装失败,或者你想要从源码编译map_server,你可以从ROS的源码仓库克隆它,并在你的catkin工作空间中编译它。
其中# 创建一个新的catkin工作空间(如果你还没有的话) mkdir -p ~/catkin_ws/src cd ~/catkin_ws/ catkin_make # 克隆map_server包 cd ~/catkin_ws/src git clone -b <branch> https://github.com/ros/navigation.git # 编译你的工作空间 cd ~/catkin_ws/ catkin_make<branch>应该替换为你所使用的ROS发行版对应的分支名,比如melodic-devel或noetic-devel。
- 如果
-
检查网络连接:
- 确保你的网络连接正常,并且能够访问ROS的源码仓库和apt源。
-
查看错误信息:
- 如果在尝试安装或编译时遇到错误,仔细阅读错误信息,它通常会给出为什么操作失败的原因。根据错误信息,你可以进一步调查问题所在。
-
更新你的系统和ROS:
- 确保你的系统和ROS都是最新版本。有时,旧版本的ROS可能不再支持,或者源可能已经更改。
如果上述方法都不能解决问题,你可能需要查看ROS的官方文档或社区论坛,以获取更具体的帮助。在提问时,提供尽可能多的错误信息和你已经尝试过的步骤,这有助于他人更快地帮助你解决问题。
以上为生成回答,仅供参考~
-
-
@1531225033 尝试重新安装了ROS环境之后也试了CSDN上设置更新与安装的方法但是都没成功,gmapping下成功了,但是map server始终提醒依赖项问题,我再逐次尝试下载依赖项最终会显示所需依赖项已经是最新版本(但是名字略有不同,本人小白,认为可能是依赖项更替换名了但是应该不会导致其他依赖项因为版本过新无法使用把)