户外机器人设计中的硬件看门狗
-
户外机器人设计中的硬件看门狗
前言
在最近的一个项目中,我们需要设计一款可以在户外365天、24小时连续工作的机器人。其核心控制模块由多个单片机组成,系统的开关是通过软开关实现的。为了确保系统的可靠性,我们在通信单片机上开启了RTC定时器,作为软件看门狗。然而,软件看门狗有时会失效,导致系统无法正常关机。因此,我们决定引入独立于单片机的硬件看门狗IC。今天,我们将介绍这个硬件看门狗的使用电路及注意事项。
1. 硬件看门狗IC介绍
TPL5010是一款超低功耗系统计时器,具有看门狗功能。其电源电压范围为1.8V至5.5V,在2.5V电压下,典型电流消耗仅为35nA。它提供100ms至7200s的可选计时间隔,计时精度为1%(典型值)。通过外部电阻可以选择时间间隔。
TPL5010的主要特点包括:
- 低功耗:仅消耗35nA电流。
- 高精度:计时器精度为1%,时间间隔可调。
- 独立工作:不依赖单片机内部计时器。
2. 定时时常与电阻选择
TPL5010的时间间隔是通过连接在DELAY/M_RST引脚上的外部电阻(REXT)来设置的。不同的电阻值对应不同的时间间隔,例如:
- 5.2kΩ 电阻:设置时间间隔为1秒
- 11.2kΩ 电阻:设置时间间隔为10秒
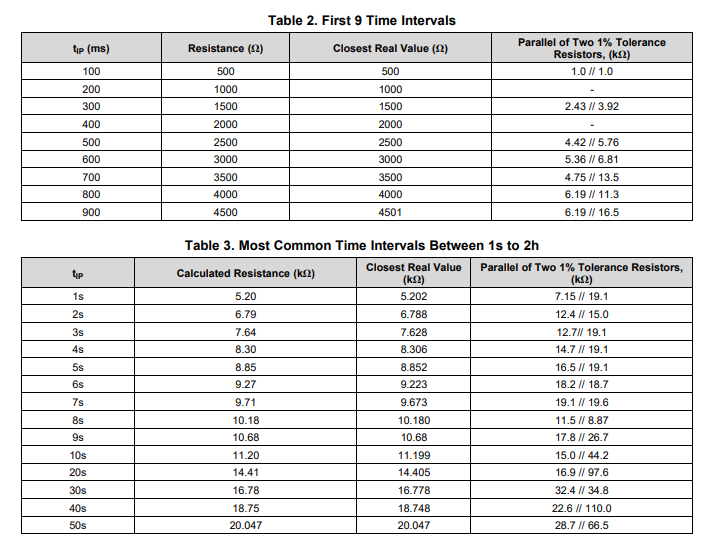
具体的电阻值与时间间隔关系可以参考以下公式:
$$
[ t_{IP} = R_{EXT} \times 10 \times 10^{-6} ]
$$
其中,$$ ( t_{IP} ) $$ 为时间间隔(秒),$$ ( R_{EXT} ) $$为外部电阻(欧姆)。3. 电路分享
以下是小鱼设计的TPL5010的看门狗电路:
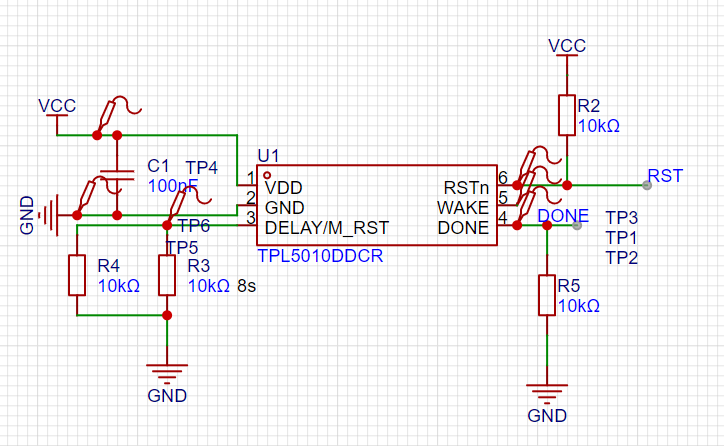
4. 注意事项
- DONE引脚加下拉电阻:为了防止引脚浮空导致的假喂狗现象,需要在DONE引脚上加一个下拉电阻。
- 无DONE信号不产生唤醒:如果没有DONE信号输入,TPL5010将不会产生唤醒信号,因此确保DONE信号正常工作非常重要。
- 防止购买假IC:建议从多家供应商处采购TPL5010,以防购买到假冒产品。
通过以上设计和注意事项,我们可以显著提高系统的可靠性,确保机器人在户外恶劣环境中也能稳定运行。希望这篇文章能对大家有所帮助