ROS2 foxy cartographer纯激光建图报错
-
用的系统是ubuntu20.04,ros2版本是foxy,我现在想要用cartographer进行纯激光建图
所用雷达的话题由卖家自动发布为utlidar/cloud_deskewed,坐标系为odom,详见附图,配置文件和代码如下:--这是lua配置文件 include "map_builder.lua" include "trajectory_builder.lua" options = { map_builder = MAP_BUILDER, trajectory_builder = TRAJECTORY_BUILDER, map_frame = "map", tracking_frame = "odom", -- base_link改为odom,发布map到odom之间的位姿态 published_frame = "base_link", --**换成odom/map也试过** odom_frame = "odom", -- true改为false,不用提供里程计数据 provide_odom_frame = false, -- false改为true,仅发布2D位资 publish_frame_projected_to_2d = true, -- false改为true,使用里程计数据 use_odometry = false, use_nav_sat = false, use_landmarks = false, -- 0改为1,使用一个雷达 num_laser_scans = 1, -- 1改为0,不使用多波雷达 num_multi_echo_laser_scans = 0, -- 10改为1,1/1=1等于不分割 num_subdivisions_per_laser_scan = 1, num_point_clouds = 0, lookup_transform_timeout_sec = 0.2, submap_publish_period_sec = 0.3, pose_publish_period_sec = 5e-3, trajectory_publish_period_sec = 30e-3, rangefinder_sampling_ratio = 1., odometry_sampling_ratio = 1., fixed_frame_pose_sampling_ratio = 1., imu_sampling_ratio = 1., landmarks_sampling_ratio = 1., } -- false改为true,启动2D SLAM MAP_BUILDER.use_trajectory_builder_2d = true -- TRAJECTORY_BUILDER_2D.scan_topic = '/utlidar/cloud_deskewed' -- 0改成0.10,比机器人半径小的都忽略 TRAJECTORY_BUILDER_2D.min_range = 0.10 -- 30改成3.5,限制在雷达最大扫描范围内,越小一般越精确些 TRAJECTORY_BUILDER_2D.max_range = 5.0 -- 5改成3,传感器数据超出有效范围最大值 TRAJECTORY_BUILDER_2D.missing_data_ray_length = 3. -- true改成false,不使用IMU数据,大家可以开启,然后对比下效果 TRAJECTORY_BUILDER_2D.use_imu_data = false -- false改成true,使用实时回环检测来进行前端的扫描匹配 TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = true -- 1.0改成0.1,提高对运动的敏感度 TRAJECTORY_BUILDER_2D.motion_filter.max_angle_radians = math.rad(0.1) -- 0.55改成0.65,Fast csm的最低分数,高于此分数才进行优化。 POSE_GRAPH.constraint_builder.min_score = 0.65 --0.6改成0.7,全局定位最小分数,低于此分数则认为目前全局定位不准确 POSE_GRAPH.constraint_builder.global_localization_min_score = 0.7 TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.linear_search_window = 0.1 TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.translation_delta_cost_weight = 10. TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.rotation_delta_cost_weight = 1e-1 POSE_GRAPH.optimization_problem.huber_scale = 1e2 POSE_GRAPH.optimize_every_n_nodes = 35 -- 设置0可关闭全局SLAM -- POSE_GRAPH.optimize_every_n_nodes = 0 return options--这是节点启动的文件 import os from launch import LaunchDescription from launch.substitutions import LaunchConfiguration from launch_ros.actions import Node from launch_ros.substitutions import FindPackageShare def generate_launch_description(): # 定位到功能包的地址 pkg_share = FindPackageShare(package='dog_map').find('dog_map') #=====================运行节点需要的配置======================================================================= # 是否使用仿真时间,我们用gazebo,这里设置成true use_sim_time = LaunchConfiguration('use_sim_time', default='false') # 地图的分辨率 resolution = LaunchConfiguration('resolution', default='0.05') # frame_id = LaunchConfiguration('frame_id', default='odom') # 地图的发布周期 publish_period_sec = LaunchConfiguration('publish_period_sec', default='1.0') # 配置文件夹路径 configuration_directory = LaunchConfiguration('configuration_directory', default=os.path.join(pkg_share, 'config')) # 配置文件 configuration_basename = LaunchConfiguration('configuration_basename', default='test_dog_2d.lua') #=====================声明三个节点,cartographer/occupancy_grid_node/rviz_node================================= cartographer_node = Node( package='cartographer_ros', executable='cartographer_node', name='cartographer_node', output='screen', parameters=[{'use_sim_time': use_sim_time}], arguments=['-configuration_directory', configuration_directory, '-configuration_basename', configuration_basename], remappings = [('/scan','/utlidar/cloud_deskewed')] ) # 修改此处以正确映射话题 occupancy_grid_node = Node( package='cartographer_ros', executable='occupancy_grid_node', name='occupancy_grid_node', output='screen', parameters=[{'use_sim_time': use_sim_time}], arguments=['-resolution', resolution, '-publish_period_sec', publish_period_sec]) rviz_node = Node( package='rviz2', executable='rviz2', name='rviz2', # arguments=['-d', rviz_config_dir], parameters=[{'use_sim_time': use_sim_time}], output='screen') #===============================================定义启动文件======================================================== ld = LaunchDescription() ld.add_action(cartographer_node) ld.add_action(occupancy_grid_node) ld.add_action(rviz_node) return ld遇到的问题:
[rviz2-3] [INFO] [1723599876.257288727] [rviz2]: Stereo is NOT SUPPORTED
[rviz2-3] [INFO] [1723599876.257418670] [rviz2]: OpenGl version: 4.6 (GLSL 4.6)
[rviz2-3] [INFO] [1723599876.282416643] [rviz2]: Stereo is NOT SUPPORTED
[occupancy_grid_node-2] [WARN] [1723599876.675592666] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1723599877.675623726] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1723599878.675600745] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1723599879.675673102] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1723599880.675637417] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[occupancy_grid_node-2] [WARN] [1723599881.675718859] [occupancy_grid_node]: submap_slices and last_frame_id is empty
[rviz2-3] [WARN] [1723599882.177420468] [rviz2]: topic '/utlidar/cloud_deskewed' has more than one types associated, rviz will arbitrarily use the type 'sensor_msgs/msg/LaserScan' -- all types for the topic: 'sensor_msgs/msg/LaserScan' 'sensor_msgs/msg/PointCloud2'
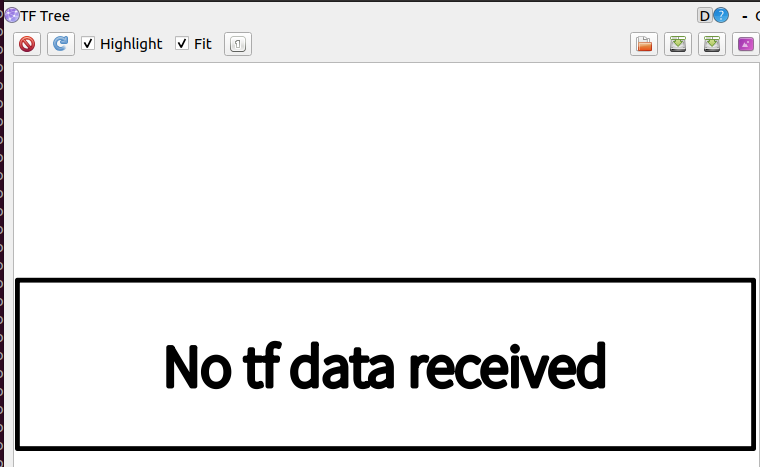
[occupancy_grid_node-2] [WARN] [1723599882.675668892] [occupancy_grid_node]: submap_slices and last_frame_id is empty没有生成TF树
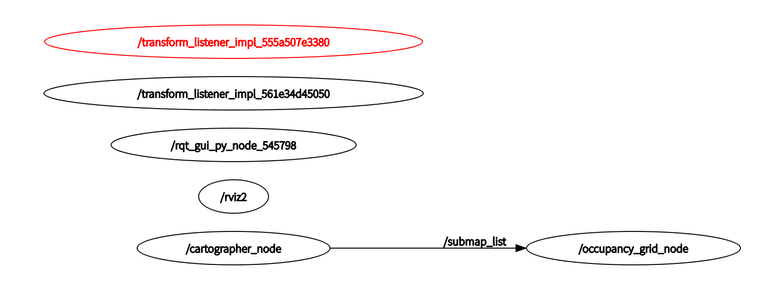
rqt_graph输出为:
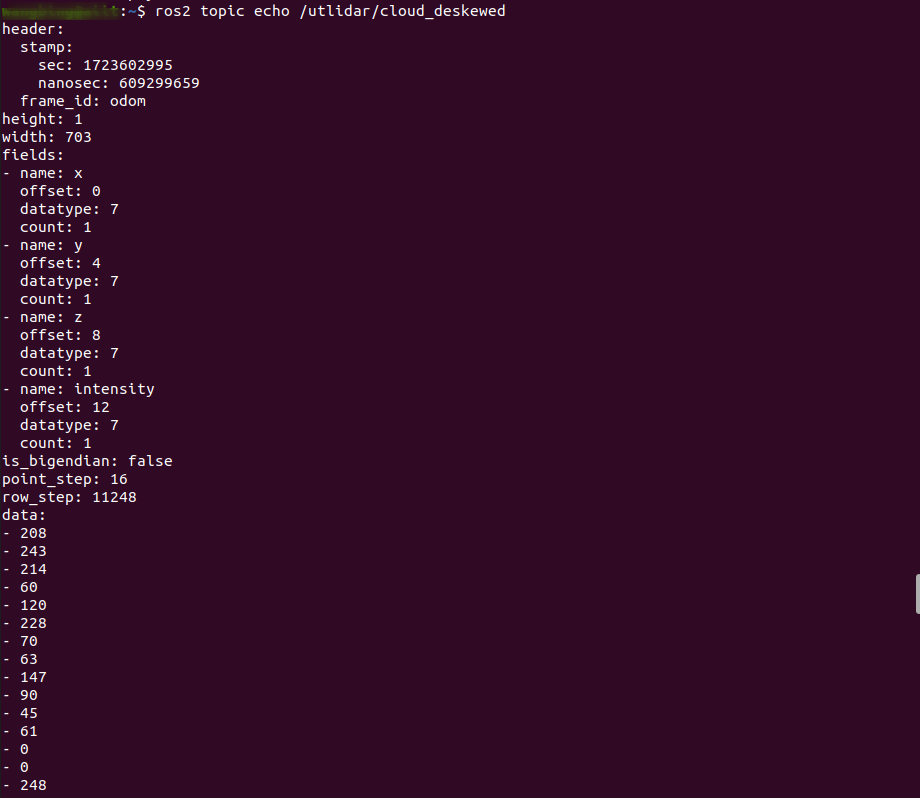
雷达话题和坐标系:

报错:

求各位大神救救孩子吧
-
从你提供的日志和配置来看,存在几个潜在的问题和解决方案,我们可以逐一排查和解决:
1.
occupancy_grid_node的警告这个警告表明
occupancy_grid_node没有接收到来自cartographer_node的任何子图(submap)数据。这通常是因为cartographer_node没有正确运行或者没有生成任何数据。解决方案:
- 确保
cartographer_node正在运行并且没有崩溃。 - 检查
cartographer_node的输出日志,看是否有更详细的错误信息。 - 确保
cartographer_node的配置文件中指定的激光话题/utlidar/cloud_deskewed是正确的,并且该话题确实在发布数据。
2. RViz 的警告
RViz 警告指出
/utlidar/cloud_deskewed话题有两种消息类型(sensor_msgs/msg/LaserScan和sensor_msgs/msg/PointCloud2),这通常不是cartographer所期望的。cartographer通常期望的是sensor_msgs/msg/LaserScan。解决方案:
- 确认
/utlidar/cloud_deskewed话题是否应该发布PointCloud2或LaserScan。如果应该发布LaserScan,检查雷达的配置或驱动设置。 - 如果雷达只能发布
PointCloud2,你可能需要编写一个转换节点将PointCloud2转换为LaserScan。
3. TF 树的缺失
没有生成 TF 树可能是因为
cartographer_node没有运行,或者没有正确发布 TF 变换。解决方案:
- 确保
cartographer_node的published_frame参数设置为正确的坐标系,通常是map。 - 检查
cartographer_node是否在日志中输出了关于 TF 的任何错误。 - 使用
ros2 tf2_echo命令检查 TF 变换是否存在。
4. 配置文件中的小错误
你的配置文件中
published_frame = "base_kink"可能是个打字错误,通常应该是base_link或其他机器人基座的坐标系,但在这个场景下应该是map。解决方案:
- 将
published_frame = "base_kink"改为published_frame = "map"。
5. 雷达话题的订阅
确保
cartographer_node正确订阅了/utlidar/cloud_deskewed话题。从你的启动文件中看,你已经做了重映射,但确认一下雷达是否确实在这个话题上发布了数据。6. 检查 ROS 2 的包和环境
- 确保所有 ROS 2 包都已正确安装,包括
cartographer_ros和相关的依赖。 - 重新启动 ROS 2 环境,确保所有服务都正确启动。
通过以上步骤,你应该能够诊断并解决你遇到的问题。如果问题仍然存在,可能需要更详细地检查
cartographer_node的日志输出,或者考虑在 ROS 2 社区或相关论坛中寻求帮助。
以上为生成回答,仅供参考~
- 确保
-
Y yu 将这个主题转为问答主题,在
-
@yu 在 ROS2 foxy cartographer纯激光建图报错 中说:
rviz2]: topic '/utlidar/cloud_deskewed' has more than one types associated, rviz will arbitrarily use the type 'sensor_msgs/msg/LaserScan' -- all types for the topic: 'sensor_msgs/msg/LaserScan' 'sensor_msgs/msg/PointCloud2'
建图需要的是LaserScan,而不是点云,你要把 utlidar/cloud_deskewed 转成LaserScan,或者直接让卖家提供下直接发布laserscan话题的配置方法,一般都支持的
-
@小鱼 我在节点启动的文件里面,用pointcloud_to_laserscan转了一下,但是我用ros2 topic echo看了一下输出话题的内容,发现里面没有数据,输入话题数据是正常的,不知道是由什么其他问题,pointcloud_to_laserscan的配置文件是:
pointcloud_to_laserscan_node: ros__parameters: target_frame: 'odom' # 设置为点云数据的 frame_id min_height: -1.0 # 根据需要设置高度过滤范围 max_height: 3.5 # 根据需要设置高度过滤范围 angle_min: -1.5708 # 通常为 -π/2(左边) angle_max: 1.5708 # 通常为 π/2(右边) angle_increment: 0.0174533 # 取决于你的扫描角度分辨率 range_min: 0.1 # 最小范围 'scan_time': 0.01 range_max: 10.0 # 最大范围 scan_height: 0.1 # 扫描高度 horizontal_sampling_ratio: 1.0 vertical_sampling_ratio: 1.0 keep_organized: true节点启动代码是:
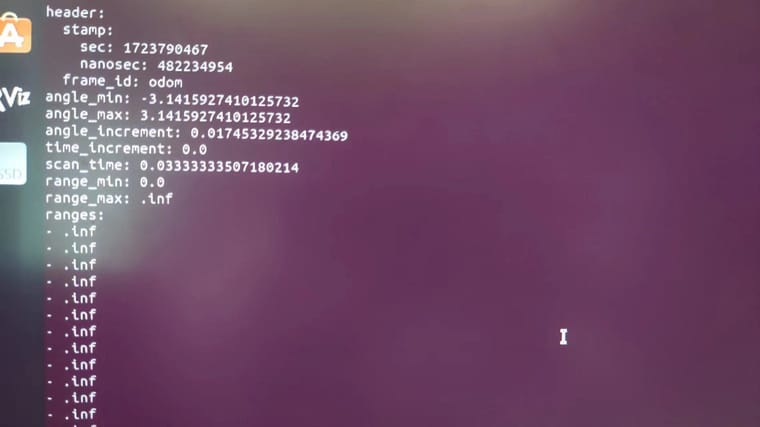
# 配置文件 configuration_basename = LaunchConfiguration('configuration_basename', default='test_dog_2d.lua') configuration_convertname = LaunchConfiguration('configuration_convertname', default='pointcloud2_to_laserscan_config.yaml') pointcloud_to_laserscan_node = Node( package='pointcloud_to_laserscan', executable='pointcloud_to_laserscan_node', name='pointcloud_to_laserscan', output='screen', arguments=['-configuration_directory', configuration_directory, '-configuration_convertname', configuration_convertname], # parameters=[{'scan_in': '/utlidar/cloud_deskewed', 'cloud': '/cartographer_scan'}], remappings=[ ('/cloud_in', '/utlidar/cloud_deskewed'), ('/scan', '/cartographer_scan') ] )现在是输出话题/cartographer_scan全是inf了:
-
@yu 在 ROS2 foxy cartographer纯激光建图报错 中说:
@小鱼 我在节点启动的文件里面,用pointcloud_to_laserscan转了一下,但是我用ros2 topic echo看了一下输出话题的内容,发现里面没有数据,输入话题数据是正常的,不知道是由什么其他问题,pointcloud_to_laserscan的配置文件是:
pointcloud_to_laserscan_node: ros__parameters: target_frame: 'odom' # 设置为点云数据的 frame_id min_height: -1.0 # 根据需要设置高度过滤范围 max_height: 3.5 # 根据需要设置高度过滤范围 angle_min: -1.5708 # 通常为 -π/2(左边) angle_max: 1.5708 # 通常为 π/2(右边) angle_increment: 0.0174533 # 取决于你的扫描角度分辨率 range_min: 0.1 # 最小范围 'scan_time': 0.01 range_max: 10.0 # 最大范围 scan_height: 0.1 # 扫描高度 horizontal_sampling_ratio: 1.0 vertical_sampling_ratio: 1.0 keep_organized: true节点启动代码是:
# 配置文件 configuration_basename = LaunchConfiguration('configuration_basename', default='test_dog_2d.lua') configuration_convertname = LaunchConfiguration('configuration_convertname', default='pointcloud2_to_laserscan_config.yaml') pointcloud_to_laserscan_node = Node( package='pointcloud_to_laserscan', executable='pointcloud_to_laserscan_node', name='pointcloud_to_laserscan', output='screen', arguments=['-configuration_directory', configuration_directory, '-configuration_convertname', configuration_convertname], # parameters=[{'scan_in': '/utlidar/cloud_deskewed', 'cloud': '/cartographer_scan'}], remappings=[ ('/cloud_in', '/utlidar/cloud_deskewed'), ('/scan', '/cartographer_scan') ] )现在是输出话题/cartographer_scan全是inf了:
但是这种已经可以建图了,只是地图上rviz没有显示点云数据,后面我再看下,感谢