Micro-ros作为订阅者订阅自定义float32[] data (数组类型)话题接口,无法进入回调函数
-
自定义的数组类型话题接口,在ROS2节点间测试中正常,但是当micro-ros作为订阅节点 就无法进入回调函数中。
-
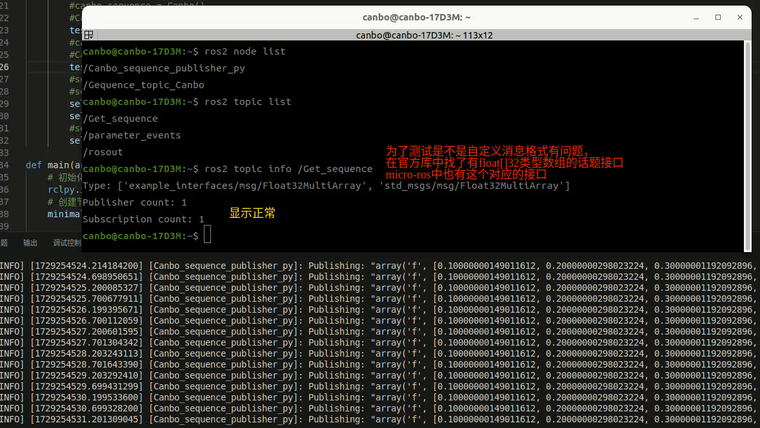
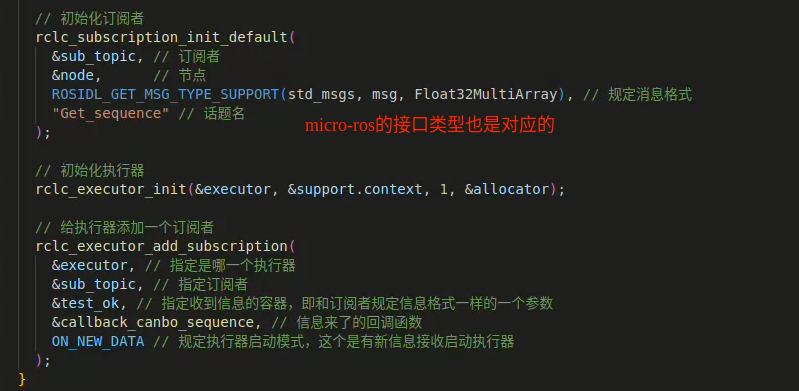
当你在使用Micro-ROS作为订阅者订阅自定义的
float32[](即浮点数组)类型的话题时,遇到无法进入回调函数的问题,可能有几个原因和解决方案需要考虑。这里列出一些常见的检查点和解决步骤:1. 检查ROS 2消息类型定义
确保你的ROS 2消息类型(
.msg文件)和对应的服务类型(如果有的话,.srv文件)已经正确定义,并且已经生成了对应的C/C++头文件。对于float32[],你应该在.msg文件中有一个类似下面的定义:# Example.msg float32[] data然后确保你使用
ros2_cli_cpp或者类似的工具生成了C++代码。2. 检查Micro-ROS客户端配置
在Micro-ROS中,你需要确保你的客户端配置(通常是
colcon.meta或CMakeLists.txt中的设置)包含了必要的依赖项和消息类型。这包括消息类型的定义和任何必要的序列化/反序列化库。3. 检查Micro-ROS的回调实现
确保你的回调函数签名与Micro-ROS期望的签名相匹配。对于数组类型,Micro-ROS可能期望你使用特定的数据结构或方式来接收数据。查看Micro-ROS的文档或示例代码,了解如何正确处理数组类型的数据。
4. 调试和日志
- 增加日志输出:在你的回调函数和其他关键位置增加日志输出,以帮助确定代码的执行流程。
- 检查网络问题:由于Micro-ROS通常运行在资源受限的设备上,网络问题可能导致消息无法正确接收。确保网络设置正确,并且没有防火墙或路由器规则阻止消息传递。
- 使用ROS 2命令行工具:使用
ros2 topic echo等ROS 2命令行工具来检查话题上是否有数据发布,并验证数据的格式和内容。
5. 检查Micro-ROS和ROS 2的兼容性
确保你使用的Micro-ROS版本与ROS 2版本兼容。不匹配的版本可能会导致意外的行为或错误。
6. 示例和文档
查看Micro-ROS的官方文档和示例代码,看看是否有关于订阅数组类型话题的特定指导或示例。
7. 社区支持
如果以上步骤都无法解决问题,考虑在Micro-ROS的GitHub仓库、论坛或相关社区中寻求帮助。提供尽可能详细的描述和代码示例,以便他人更容易理解问题并提供帮助。
通过上述步骤,你应该能够更接近问题的根源,并找到解决问题的方法。如果问题依然存在,可能需要更深入地检查Micro-ROS的底层实现或寻求专业的技术支持。
以上为生成回答,仅供参考~
-
@1976933473 秃头学生党求助各位大佬,请各位不吝赐教,问题解决,请大佬喝杯霸王茶姬。
-
@1976933473
我个人又经过测试,选择了LaserScan类型数据话题接口进行测试,LaserScan类型数据中有简单的数据如float32 angle_min和int32 sec 等也有float32[] ranges、float32[] intensities,
经过测试,micro-ros作为发布节点,ROS2订阅节点可以正常获取float32[] ranges数据,但是ROS2作为发布节点,micro-ros作为订阅节点,如果float32[] ranges、float32[] intensities被赋值那么就无法进入micro-ros的接收回调函数中,即无法获取如何数据,
如果float32[] ranges、float32[] intensities为空列表,可以正常获取float32 angle_min和int32 sec 等简单类型数据值!!!使用ubuntu22.04 ,ros2-humble, ESP32-S3运行micro-ros
个人认为这个ROS系统bug