每一步都是i按照正常步骤走的,怎么后面点击Rviz2工具栏—2D Pose Estimate和Nav2 Goal之后机器人不会移动
-
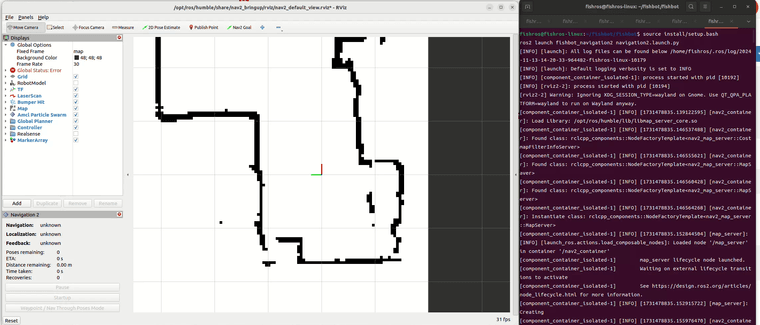



 每一步都是i按照正常步骤走的,怎么后面点击Rviz2工具栏—2D Pose Estimate和Nav2 Goal之后机器人不会移动
每一步都是i按照正常步骤走的,怎么后面点击Rviz2工具栏—2D Pose Estimate和Nav2 Goal之后机器人不会移动 -
在Rviz2中,当你按照正常步骤操作后,点击2D Pose Estimate和Nav2 Goal按钮机器人却不会移动,可能的原因和解决方法如下:
可能的原因
-
IP地址不一致:
- 客户端(如虚拟机)和服务端(如ROS核心节点运行的机器)的IP地址不一致,可能导致通信失败。
-
网络连接问题:
- 虚拟机与电脑主机的网络连接方式可能影响ROS节点间的通信。例如,NAT模式下虚拟机的主机IP和计算机的IP地址可能不在同一网段。
-
ROS环境变量设置不当:
- ROS环境变量如
ROS_HOSTNAME、ROS_MASTER_URI和ROS_IP未正确设置,可能导致节点间无法正确通信。
- ROS环境变量如
-
导航栈配置问题:
- 导航栈配置不正确,或者机器人的参数(如底盘尺寸、传感器位置等)未正确设置,可能导致路径规划失败。
-
传感器数据问题:
- 传感器未正确连接或设置,或者传感器数据未正确传递给导航算法,可能导致导航失败。
-
坐标系问题:
- 在Rviz中设置目标点时选择了错误的坐标系,可能导致机器人无法正确导航到目标点。
解决方法
-
检查并修改IP地址:
- 确保客户端和服务端的IP地址一致。可以通过查看虚拟机(客户端)的IP地址,并核对和修改
.bashrc文件中的ROS环境变量来确保一致性。
- 确保客户端和服务端的IP地址一致。可以通过查看虚拟机(客户端)的IP地址,并核对和修改
-
更改网络连接模式:
- 将虚拟机与电脑主机的网络连接方式从NAT模式改为桥接模式,以确保虚拟机的主机IP和计算机的IP地址在同一网段。
-
设置正确的ROS环境变量:
- 在
.bashrc文件中设置正确的ROS_HOSTNAME、ROS_MASTER_URI和ROS_IP环境变量。确保这些变量正确指向ROS核心节点运行的机器和端口。
- 在
-
检查并配置导航栈:
- 确保导航栈已正确配置,并检查机器人的参数设置是否正确。这包括底盘尺寸、传感器位置等关键参数。
-
检查传感器连接和数据:
- 确保传感器已正确连接并设置,且传感器数据能够正确传递给导航算法。可以通过查看传感器数据输出和调试信息来验证这一点。
-
选择正确的坐标系:
- 在Rviz中设置目标点时,确保选择了正确的坐标系。可以通过查看地图和路径规划来验证目标点的设置是否正确。
-
重启系统和节点:
- 在修改配置或环境变量后,重启虚拟机和ROS小车,以确保所有设置生效。同时,确保所有相关节点都已正确启动并运行。
-
寻求帮助:
- 如果以上方法都无法解决问题,可以在ROS论坛或相关社区寻求帮助。向其他有经验的用户请教,他们可能会提供更具体的解决方案。
综上所述,点击Rviz2工具栏的2D Pose Estimate和Nav2 Goal按钮后机器人不会移动的问题可能涉及多个方面,需要逐一排查并采取相应的解决措施。
以上为生成回答,仅供参考~
-
-
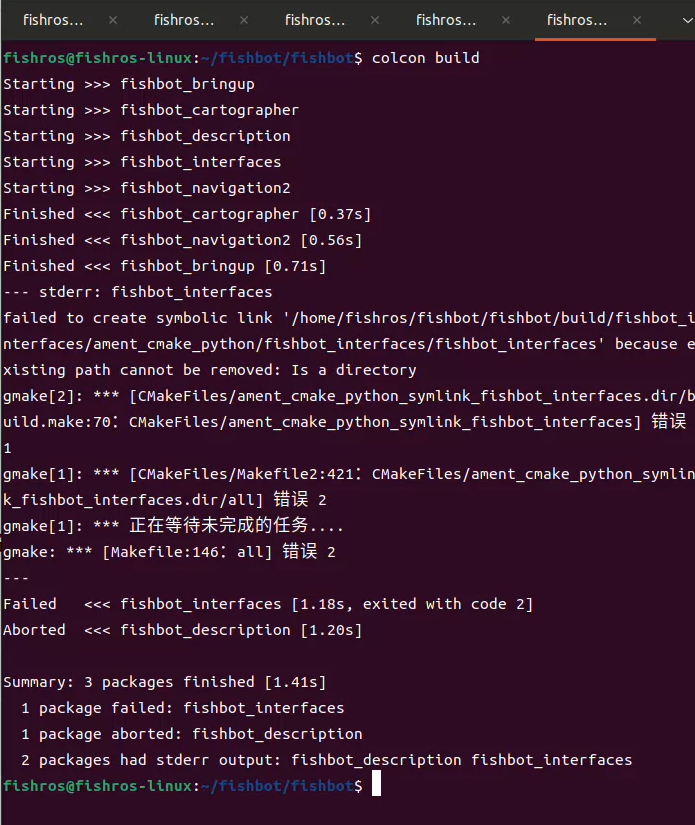
@2368028649 colcon build 构建目录对吗?
https://fishros.org.cn/forum/topic/151/提问前必看-不符合要求的问题拒绝回答
@小鱼 在 提问前必看!不符合要求的问题拒绝回答!! 中说:
- 不要截图,要复制粘贴,一定要代码块包裹
不要截图的原因是,代码方便回答者去复制帮你搜索,而且无论是在手机上还是电脑上都更容易看。
- 不要截图,要复制粘贴,一定要代码块包裹