8.3.4 无法初始化导航点
-
按照书本上的进行了设置,一步步走到8-33,也启动了仿真和导航,都没有报错,但是一直没办法用RViz初始化导航目标点。代码检查了很多遍,甚至用了原github进行了替换,还是没办法初始化导航点。其中主要的控制插件设置如下:
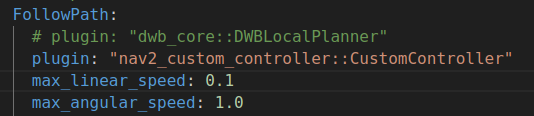
让我很好奇的是这个插件名字nav2_custom_controller::CustomController是哪来的,原来的代码清单8-27(如下)也没有设置name。但是我后面即便加上name再测试也没用。
 。
。
所有步骤和之前8.2节的自定义规划算法都一样的,检查了很多遍,问题出在哪? -
针对您提到的问题,无法初始化导航目标点,并且好奇
nav2_custom_controller::CustomController这个插件名称的来源,这里有几个可能的原因和排查步骤供您参考:-
插件名称的来源:
nav2_custom_controller::CustomController这个名称通常是自定义控制器在ROS 2中的完整名称,包括包名和类名。如果在您的代码中或配置文件中出现了这个名称,那么很可能是在某个地方(如YAML配置文件或代码实现中)定义了这个控制器。- 检查您的ROS 2包中的
CMakeLists.txt和package.xml文件,确认是否有一个名为nav2_custom_controller的包,并且这个包中是否有一个名为CustomController的类。 - 如果这个名称不是您定义的,可能是从某个示例代码或教程中复制粘贴时未更改导致的。
-
检查配置文件:
- 确保您的导航配置文件(如
amcl.yaml,global_costmap.yaml,local_costmap.yaml,move_base.yaml等)正确无误,并且包含了正确的控制器和插件设置。 - 特别是检查
move_base.yaml中是否有关于控制器的配置,比如controller_config部分是否指向了正确的控制器插件。
- 确保您的导航配置文件(如
-
RViz配置:
- 在RViz中,确保您已经添加了正确的2D Nav Goal工具,并且这个工具已经配置为指向正确的
/move_base_simple/goal话题(这是ROS 1中常用的设置,ROS 2中可能有所不同,需要查看具体文档)。 - 检查RViz中的显示设置,确保相关的图层(如costmap, path等)已经正确配置和显示。
- 在RViz中,确保您已经添加了正确的2D Nav Goal工具,并且这个工具已经配置为指向正确的
-
日志和调试:
- 启动ROS 2节点时,使用
ros2 node list和ros2 topic list查看所有活跃的节点和话题,确保所有需要的组件都已正确启动。 - 使用
ros2 topic echo /some_topic(替换为实际的话题名)来查看特定话题的输出,确认数据是否正确。 - 查看ROS 2的日志输出,使用
ros2 log list和ros2 log show /some_node(替换为实际的节点名)来检查是否有错误或警告信息。
- 启动ROS 2节点时,使用
-
代码和依赖:
- 如果您是从GitHub或其他地方复制的代码,确保您已经正确编译并安装了所有依赖项。
- 检查您的代码库是否是最新的,特别是如果您是从一个活跃的开源项目中获取的。
-
环境问题:
- 确保您的ROS 2环境配置正确,包括环境变量(如
ROS_DOMAIN_ID)和工作空间设置。
- 确保您的ROS 2环境配置正确,包括环境变量(如
通过上述步骤,您应该能够定位问题的根源。如果问题仍然存在,可能需要更详细地检查代码和配置文件,或者考虑在ROS社区或相关论坛中寻求帮助。
以上为生成回答,仅供参考~
-
-
初始化导航点的结果:

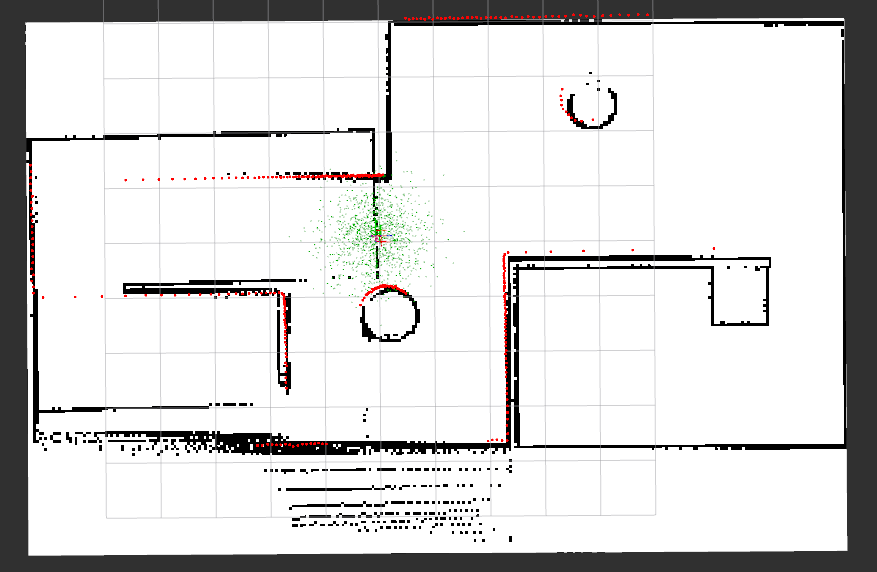
只有雷达,没有膨胀体积的,导航也提示没有初始化导航点 -
@1533453228 大概率是插件相关配置有问题,建议等等视频,或者仔细检查下Nav2的启动日志
-
@1533453228 我也遇到同样的问题了,请问你是怎么解决的?