使用moveit2使用配置助手创建自己机械臂的功能包时崩溃
-
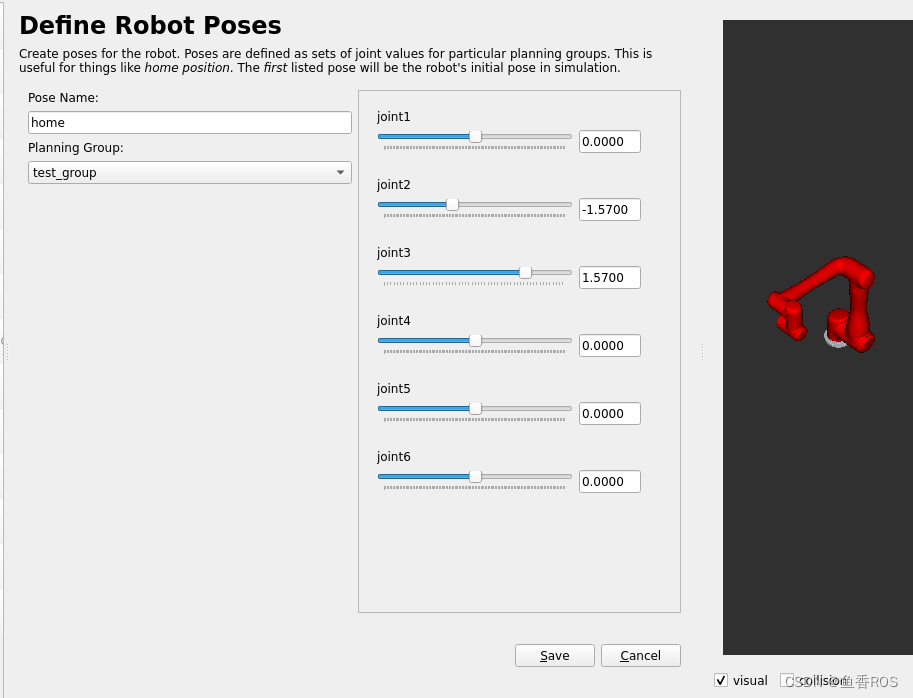
在根据教程《动手学Moveit2|使用配置助手创建自己机械臂的功能包》,用助手配置机器人的初始点位时,点击joint,修改角度时,会导致moveit崩溃,并抛出如下错误

-
在使用MoveIt2配置助手时遇到崩溃问题确实可能会让人头疼。以下是一些可能的解决步骤和调试方法,帮助你诊断并解决这个问题:
-
检查系统日志和错误输出:
- 首先,确保你查看了崩溃时系统给出的错误消息和堆栈跟踪。这些通常可以在终端或MoveIt2配置助手的日志窗口中找到。
- 特别注意任何与内存访问错误(如段错误)或未处理的异常相关的消息。
-
更新和安装依赖:
- 确保你的ROS 2和MoveIt2安装是最新的,并且所有依赖都已正确安装。有时候,软件的更新可能修复了已知的错误。
- 使用
rosdep来安装所有必需的依赖项。
-
检查URDF/XACRO文件:
- 确保你的URDF或XACRO文件没有语法错误。错误的URDF文件可能导致MoveIt2无法正确解析关节信息。
- 使用
urdf_to_graphviz工具可视化你的URDF文件,确保所有关节和链接都已正确连接。
-
资源限制:
- 检查你的系统是否有足够的资源(如内存和CPU)来运行MoveIt2配置助手。资源不足可能导致程序崩溃。
- 尝试在资源使用较低的时候运行配置助手。
-
尝试不同的操作方式:
- 有时候,特定的操作顺序或用户输入可能导致软件崩溃。尝试以不同的顺序执行相同的操作,看看是否仍然崩溃。
- 如果可能,尝试在不同的计算机或虚拟机上运行配置助手,以排除硬件特定的问题。
-
查看MoveIt2的GitHub问题和社区:
- 访问MoveIt2的GitHub仓库,查看是否有其他人报告了类似的问题。
- 在ROS社区论坛或MoveIt2的Slack频道中寻求帮助。
-
使用调试工具:
- 如果上述步骤都不能解决问题,你可以尝试使用GDB等调试工具来运行MoveIt2配置助手,并捕获崩溃时的详细信息。
- 这需要一些调试技能,但可以提供关于崩溃原因的更多线索。
-
简化问题:
- 尝试用一个更简单的URDF文件(例如,只有一个关节的机器人)来运行配置助手,看看是否仍然崩溃。这有助于确定问题是否与你的URDF文件相关。
通过上述步骤,你应该能够更接近问题的根源,并找到解决问题的方法。如果问题仍然存在,可能需要更深入地调查MoveIt2的内部工作机制或寻求来自MoveIt2开发者的帮助。
以上为生成回答,仅供参考~
-