ros
-
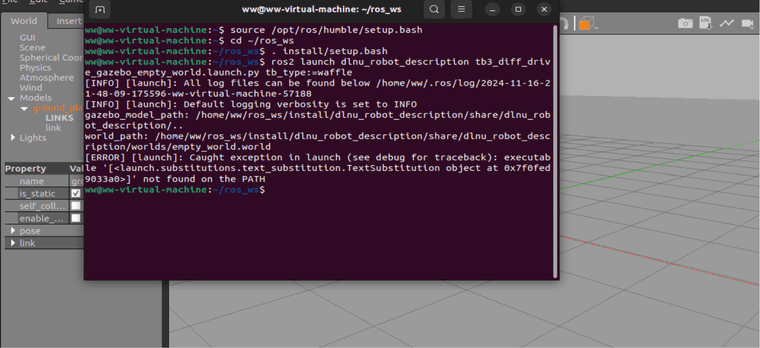
ros不能正常打开模型,gazebo正常打开,但显示不出机器模型
-
当ROS(Robot Operating System)和Gazebo联合使用时,如果遇到ROS无法正常打开模型,但Gazebo可以打开但无法显示机器模型的问题,可能是由于多种原因导致的。以下是一些可能的解决步骤和检查点:
-
检查ROS和Gazebo的版本兼容性:
确保你安装的ROS和Gazebo版本是相互兼容的。不同版本的ROS(如ROS 1的Indigo, Jade, Kinetic, Melodic, Noetic等)和Gazebo(如Gazebo 7, 8, 9, 11等)之间的兼容性可能会有所不同。 -
检查URDF文件:
- 确保你的URDF(Unified Robot Description Format)文件是正确的,没有语法错误。
- 使用
check_urdf工具来验证URDF文件的有效性。 - 确保URDF文件中引用的所有文件(如材质文件、网格文件等)路径都是正确的。
-
检查启动文件:
- 检查你的ROS启动文件(如
.launch文件),确保所有必要的节点和参数都已正确配置。 - 确保启动文件中指定的Gazebo世界文件(
.world文件)和机器人模型文件(.urdf或.xacro文件)路径是正确的。
- 检查你的ROS启动文件(如
-
检查环境变量:
- 确保
ROS_MASTER_URI和GAZEBO_MASTER_URI环境变量设置正确,以便ROS和Gazebo能够正确通信。 - 检查
GAZEBO_MODEL_PATH环境变量是否包含了你的模型文件的路径。
- 确保
-
查看日志输出:
- 启动ROS和Gazebo时,注意查看终端中的输出和错误信息。
- 使用
roscore单独启动ROS核心,然后逐一启动其他节点,观察是否有错误输出。 - 查看Gazebo的日志文件,通常位于
~/.gazebo/logs/目录下。
-
重新构建和安装:
- 如果你的工作环境是从源代码构建的,尝试重新构建你的工作空间。
- 确保所有依赖都已正确安装。
-
简化问题:
- 尝试使用一个简单的URDF文件和一个基本的Gazebo世界文件来启动系统,看是否能正常工作。
- 如果简单设置可以工作,逐步添加复杂性,以确定是哪个部分导致了问题。
-
社区和资源:
- 搜索ROS和Gazebo的官方文档和论坛,看看是否有其他人遇到并解决了类似的问题。
- 在Stack Overflow或ROS Answers等平台上提问,并提供足够的信息以便他人帮助你。
通过上述步骤,你应该能够诊断并解决ROS和Gazebo联合使用时遇到的问题。如果问题仍然存在,可能需要更深入地检查具体的配置和代码。
以上为生成回答,仅供参考~
-
-
@1487542142 问题以解决,是缺少安装补件,sudo apt install ros-humble-xacro