ros2+galactic,用ros2 topic list无法看到发布中的topic。
-
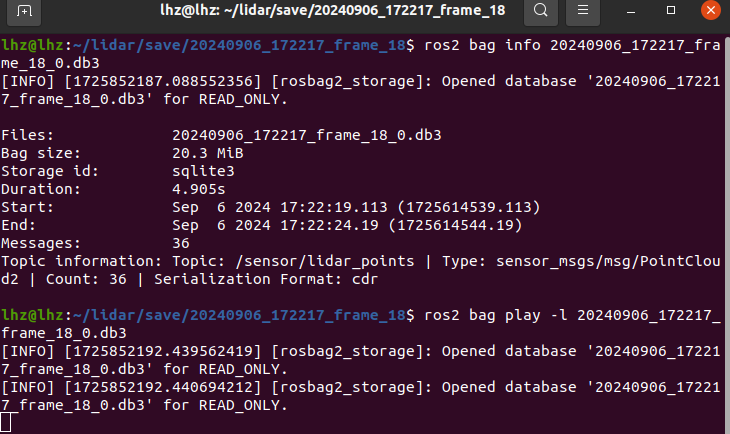
ros2进行播包,但是用topic list无法查询到对应topic。

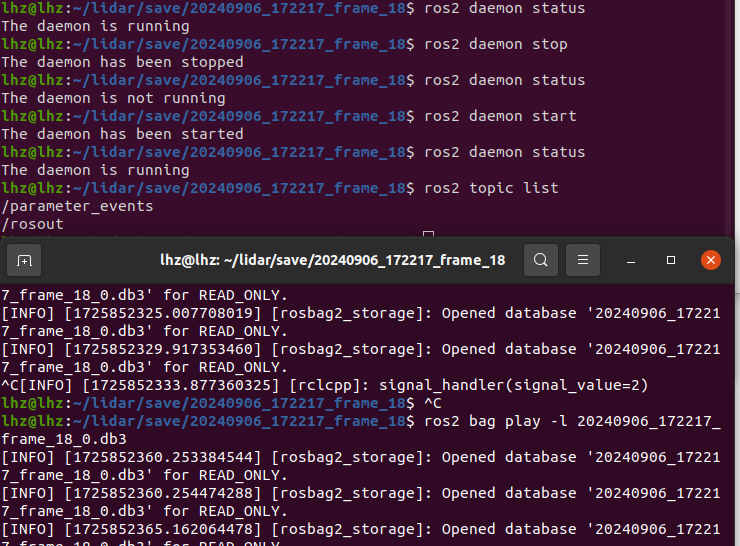
尝试重启daemon之后,依旧无法正常显示。
-
在使用ROS 2(如Galactic版本)时,如果遇到
ros2 topic list无法显示已发布的topics的情况,可能是由几个不同的问题引起的。以下是一些排查和解决此问题的步骤:-
确认ROS 2环境已正确设置:
确保你的ROS 2环境变量(如ROS_DOMAIN_ID、ROS_VERSION等)已正确设置。你可以通过echo $ROS_DOMAIN_ID来查看当前设置的domain ID。不同的节点或终端可能需要在同一个domain ID下才能相互通信。 -
检查节点是否正在运行:
使用ros2 node list来查看当前运行的节点。确保你的节点确实已经启动并且没有因为错误而停止。 -
检查节点是否正确发布topics:
如果节点正在运行,但topics未显示,可能是因为节点没有正确发布topics。你可以查看节点的日志输出(通常通过ros2 run命令启动节点时,在终端会有输出),看看是否有关于topics发布的错误信息。 -
检查节点的配置:
检查你的节点代码,确保它使用了正确的ROS 2 API来发布topics。例如,如果你使用的是C++,确保你调用了rclcpp::Publisher的发布函数;如果是Python,确保你使用了rclpy.create_publisher并调用了publish方法。 -
使用
ros2 topic info查看特定topic的信息:
即使ros2 topic list没有显示所有topics,你也可以尝试使用ros2 topic info <topic_name>来查看特定topic的详细信息。这可以帮助你确认topic是否存在,但可能由于某些原因没有被列出。 -
检查权限和网络问题:
确保没有防火墙或网络策略阻止ROS 2的节点之间的通信。此外,如果你在多个用户或不同的机器上运行ROS 2,确保它们具有适当的权限和网络连接。 -
尝试重新构建并安装ROS 2:
如果上述步骤都不能解决问题,可能是ROS 2安装或配置出现了问题。尝试重新从源代码构建ROS 2,或者重新安装预编译的ROS 2版本。 -
查看ROS 2的GitHub问题和社区论坛:
ROS 2的GitHub仓库和社区论坛中可能有人遇到并解决了类似的问题。搜索相关的issue或帖子可能会提供额外的帮助。 -
检查ROS 2的日志:
查看ROS 2的日志文件,这些文件通常位于~/.local/log/ros2_tracing(取决于你的ROS 2安装和配置)或其他类似的位置。这些日志可能包含有关topics发布和订阅失败的详细信息。
通过上述步骤,你应该能够诊断并解决
ros2 topic list不显示已发布topics的问题。如果问题仍然存在,可能需要更深入地查看你的ROS 2配置或代码实现。
以上为生成回答,仅供参考~
-
-
你好,请问问题解决了吗?