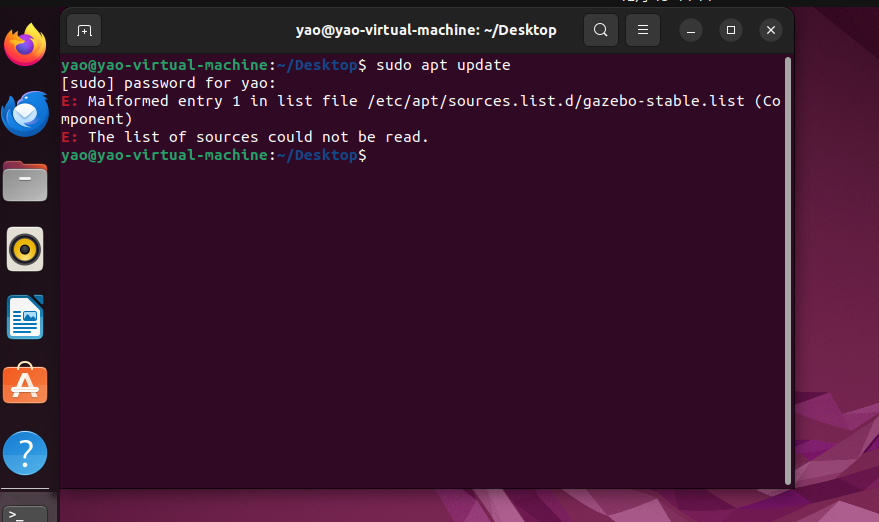
请问在ros2一键安装后为什么安装Turtlebot4时候显示: Malformed entry 1 in list file /etc/apt/sources.list.d/gazebo-stable.list (Component) 等
-
科学上网也不行...
-
在安装ROS2及Turtlebot4时遇到“Malformed entry 1 in list file /etc/apt/sources.list.d/gazebo-stable.list (Component)”这类错误,通常是由于APT源列表文件中的条目格式不正确或源文件损坏所致。以下是一些可能的解决步骤和建议:
-
检查并修复源列表文件:
- 使用
cat命令查看gazebo-stable.list文件的内容,确认其格式是否正确。例如,一个正确的APT源条目应该类似于:
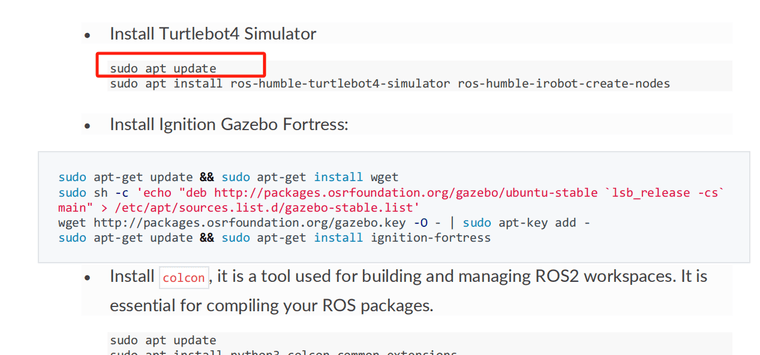
deb [trusted=yes] http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main其中
lsb_release -cs会输出当前Ubuntu的版本代号(如focal,bionic等)。-
如果发现格式错误,如缺少版本号、多余的空格或字符等,应手动编辑该文件进行修正。
-
如果不确定如何修改,可以尝试删除该文件后重新添加正确的源。使用
sudo rm /etc/apt/sources.list.d/gazebo-stable.list删除文件,然后按照官方文档或安装指南重新添加源。
- 使用
-
更新APT源:
- 在修改或删除源列表文件后,运行
sudo apt-get update来更新APT源列表。
- 在修改或删除源列表文件后,运行
-
检查网络设置:
- 尽管“科学上网”在某些情况下可能有助于访问被限制的资源,但它也可能导致APT源列表更新失败。确保你的网络连接是稳定的,并且没有防火墙或代理设置阻止APT访问其源服务器。
-
使用官方文档和社区资源:
-
查阅ROS2和Turtlebot4的官方文档,了解正确的安装步骤和依赖项。
-
访问ROS社区论坛或问答网站,如ROS Answers,寻求帮助或查找类似问题的解决方案。
-
-
考虑使用一键安装脚本的替代方法:
- 如果你使用的是一键安装脚本(如“鱼香ROS”),并且遇到了问题,可以尝试手动安装ROS2和Turtlebot4。这通常涉及下载源代码、编译和安装依赖项等步骤。
-
检查系统兼容性:
- 确保你的操作系统版本与ROS2和Turtlebot4兼容。不兼容的操作系统版本可能会导致安装过程中出现问题。
-
清理APT缓存:
- 有时候,APT缓存中的旧数据可能会导致更新失败。可以尝试运行
sudo apt-get clean来清理APT缓存。
- 有时候,APT缓存中的旧数据可能会导致更新失败。可以尝试运行
综上所述,解决“Malformed entry 1 in list file”错误通常涉及检查和修复APT源列表文件、更新APT源、检查网络设置以及使用官方文档和社区资源。如果问题仍然存在,可能需要考虑使用替代的安装方法或检查系统兼容性。
以上为生成回答,仅供参考~
-