qt ros执行报错;找不到可执行程序
-
我新建了一个ros2的功能包,src下面的代码是qt写的,colcon build可以生成可执行程序。但是ros2run的时候报错找不到可执行程序,手动执行可执行程序是可以的。```
 file:///home/zzy/%E5%9B%BE%E7%89%87/%E6%88%AA%E5%9B%BE/%E6%88%AA%E5%9B%BE%202024-12-24%2017-25-03.png
file:///home/zzy/%E5%9B%BE%E7%89%87/%E6%88%AA%E5%9B%BE/%E6%88%AA%E5%9B%BE%202024-12-24%2017-25-03.png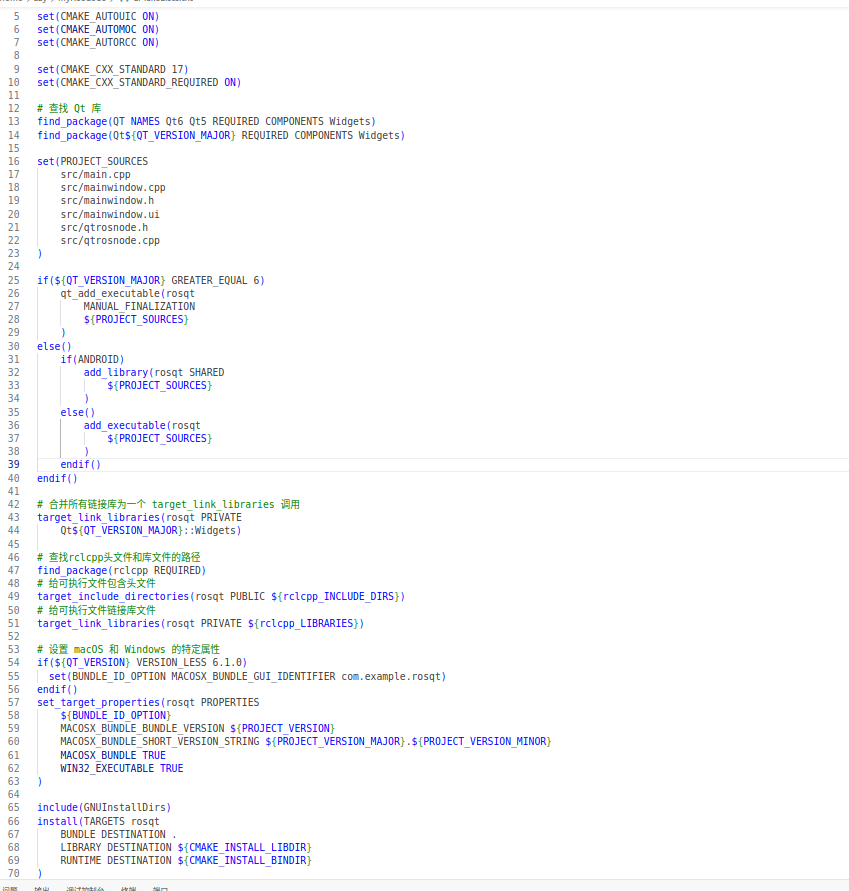 file:///home/zzy/%E5%9B%BE%E7%89%87/%E6%88%AA%E5%9B%BE/%E6%88%AA%E5%9B%BE%202024-12-24%2017-26-52.png
file:///home/zzy/%E5%9B%BE%E7%89%87/%E6%88%AA%E5%9B%BE/%E6%88%AA%E5%9B%BE%202024-12-24%2017-26-52.png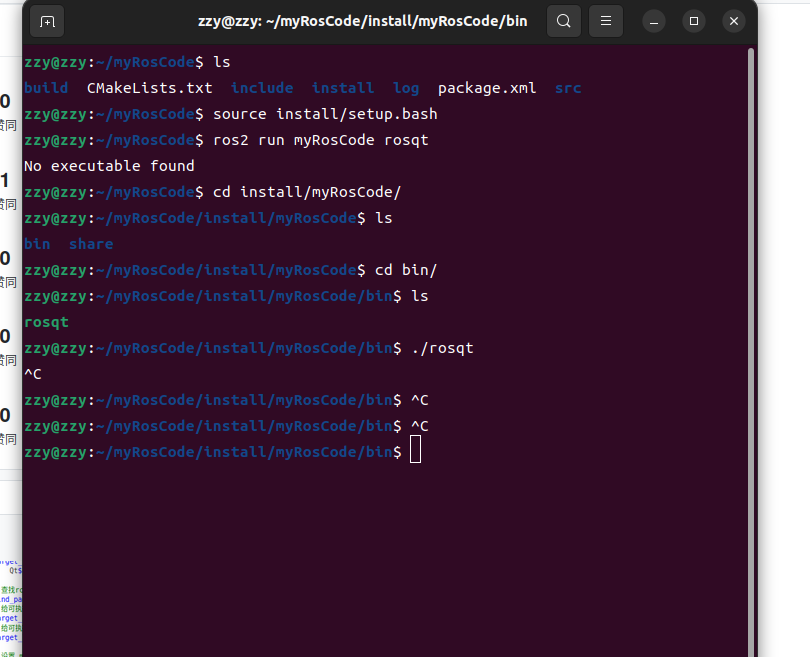 file:///home/zzy/%E5%9B%BE%E7%89%87/%E6%88%AA%E5%9B%BE/%E6%88%AA%E5%9B%BE%202024-12-24%2017-28-13.png
file:///home/zzy/%E5%9B%BE%E7%89%87/%E6%88%AA%E5%9B%BE/%E6%88%AA%E5%9B%BE%202024-12-24%2017-28-13.png -
在使用 ROS 2 和 Qt 一起开发时,如果遇到
ros2run找不到可执行程序的问题,通常可能是因为以下几个原因:-
可执行文件的路径问题:
- 确保你的可执行文件被正确地构建在 ROS 2 的安装空间(install space)中。通常,使用
colcon build后,可执行文件会位于<workspace>/install/<package_name>/lib/<package_name>或<workspace>/install/bin下。 - 检查
setup.py或CMakeLists.txt中是否正确设置了可执行文件的安装路径。
- 确保你的可执行文件被正确地构建在 ROS 2 的安装空间(install space)中。通常,使用
-
环境变量问题:
- 确保你的 ROS 2 环境变量(如
ROS_INSTALL_SPACE或CMAKE_PREFIX_PATH)正确设置,并且包含了你的工作空间安装目录。 - 使用
source <workspace>/install/setup.bash来设置环境变量,确保ros2run能够找到你的包。
- 确保你的 ROS 2 环境变量(如
-
package.xml和CMakeLists.txt/setup.py配置:- 在
package.xml中,确保你的<buildtool_depend>和<exec_depend>中包含了所有必要的依赖。 - 在
CMakeLists.txt或setup.py中,确保你正确声明了可执行文件。例如,在CMakeLists.txt中,你应该有类似add_executable(my_executable src/main.cpp)和install(TARGETS my_executable DESTINATION lib/${PROJECT_NAME})的语句。
- 在
-
检查可执行文件的名称:
- 确保你在
ros2run命令中使用的包名和可执行文件名完全正确。例如,如果你的包名是my_qt_package,可执行文件是my_qt_app,则应该使用ros2run my_qt_package my_qt_app。
- 确保你在
-
重新构建和刷新环境:
- 尝试清理你的构建目录(通常是
<workspace>/build),然后重新运行colcon build。 - 确保在每次修改
CMakeLists.txt、setup.py或package.xml后都重新构建。 - 每次切换工作空间或修改环境变量后,记得重新
source相应的setup.bash文件。
- 尝试清理你的构建目录(通常是
-
检查日志和输出:
- 仔细查看
colcon build的输出,确保没有错误或警告。 - 使用
ros2 pkg list查看已安装的包列表,确认你的包已经正确安装。
- 仔细查看
如果以上步骤都无法解决问题,建议检查你提供的截图(虽然这里无法直接查看图片内容),看看是否有更具体的错误信息或配置细节可以帮助诊断问题。此外,确保你的 ROS 2 和 Qt 的版本兼容,并且所有依赖都已正确安装。
以上为生成回答,仅供参考~
-
-