机器人路径规划feedback显示aborted怎么解决@路径规划@aborted怎么解决
-
 @路径规划@aborted怎么解决
@路径规划@aborted怎么解决 -
在机器人路径规划中,如果遇到feedback显示“aborted”的情况,这通常意味着路径规划过程中出现了某种中断或错误。以下是一些可能的解决方案,这些方案基于常见的错误原因和解决方法:
-
检查环境设置:
- 确保机器人所处的环境是稳定且符合预期的,没有突发的障碍物或环境变化。
- 检查机器人的传感器和反馈系统是否正常工作,确保能够准确获取环境信息。
-
分析路径规划算法:
- 检查路径规划算法的实现是否存在逻辑错误或不合理之处。
- 验证算法是否适用于当前的环境和机器人配置。
-
检查资源使用情况:
- 监控机器人的资源使用情况,如CPU、内存等,确保有足够的资源来执行路径规划任务。
- 如果资源不足,尝试优化算法或增加资源。
-
考虑权限问题:
- 如果机器人需要访问某些受限资源或执行特定操作,确保它具有相应的权限。
- 检查操作系统的权限设置,确保机器人应用程序有足够的权限来执行路径规划。
-
检查外部依赖:
- 如果路径规划依赖于外部系统或数据(如地图、障碍物信息等),确保这些依赖是可用和准确的。
- 检查网络连接、数据库连接等外部依赖的状态。
-
查看日志和错误信息:
- 仔细查看机器人的日志文件,查找与“aborted”相关的错误信息。
- 分析错误信息,确定导致中断的具体原因。
-
更新和修补:
- 确保机器人的操作系统、路径规划算法和相关软件都是最新的,并已应用所有必要的补丁。
- 如果使用的是第三方库或框架,请确保它们也是最新的,并且与机器人的其他组件兼容。
-
调试和测试:
- 使用调试工具对机器人进行调试,以定位和解决问题。
- 在不同的环境和场景下测试机器人的路径规划功能,确保它能够稳定地工作。
-
考虑硬件问题:
- 如果以上方法都无法解决问题,可能需要考虑硬件故障的可能性。
- 检查机器人的硬件组件,如传感器、处理器等,确保它们没有损坏或故障。
综上所述,解决机器人路径规划feedback显示“aborted”的问题需要从多个方面入手,包括环境设置、算法实现、资源使用、权限设置、外部依赖、日志分析、更新修补、调试测试和硬件检查等。通过系统地排查和解决这些问题,可以提高机器人路径规划的稳定性和可靠性。
以上为生成回答,仅供参考~
-
-
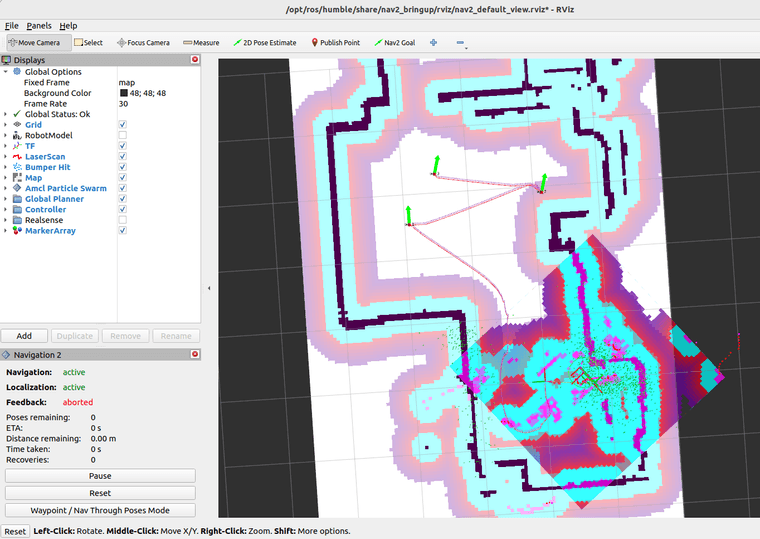
@2368028649 看图可知,路径周围都是障碍物,肯定走不动的,就像一个车被围的水泄不通一样