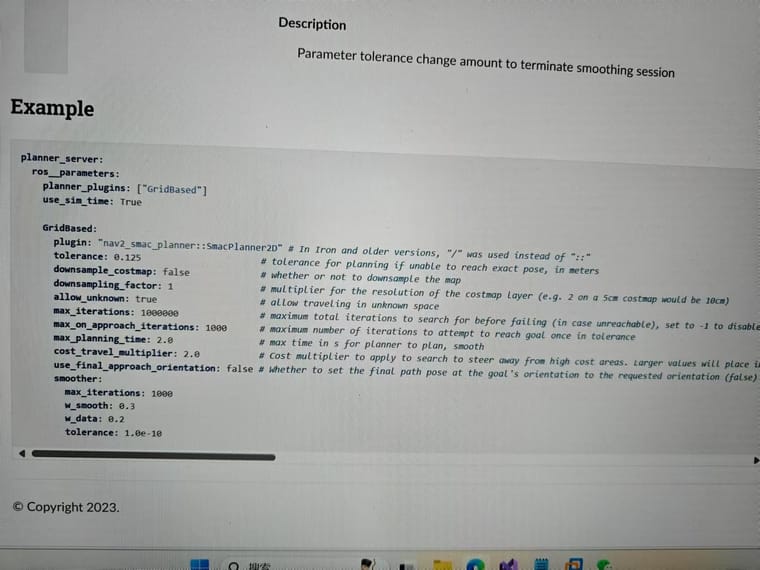
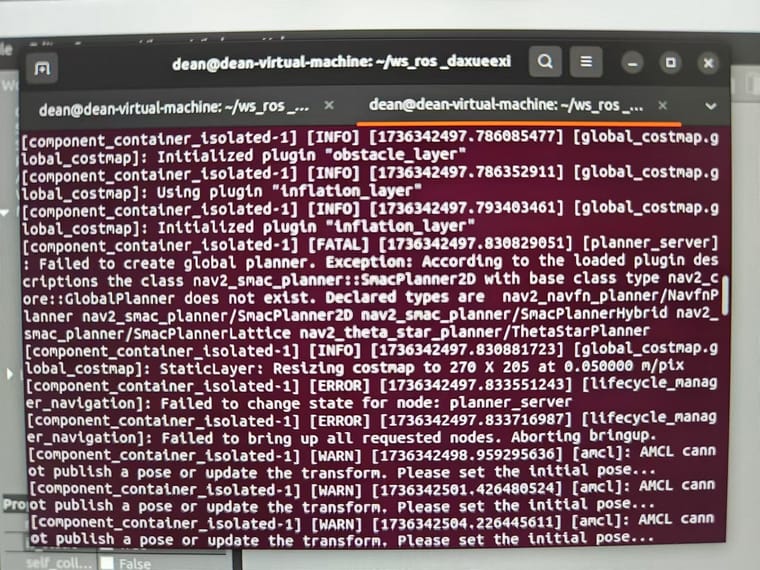
按照官网修改规划服务器,lifecycle_manager_navigation报错,有没有大佬知道什么问题
-
-
要解决
lifecycle_manager_navigation报错的问题,我们需要更具体的错误信息来确定问题的根源。不过,我可以提供一些通用的步骤和建议来帮助你调试和解决这个问题:-
查看错误日志:
- 首先,确保你查看了 ROS 的日志输出,这通常可以通过运行
rosconsole log:info或rosconsole log:debug来获取更详细的日志信息。 - 检查是否有具体的错误信息或堆栈跟踪,这些信息通常会指出是哪个文件或哪一行代码出了问题。
- 首先,确保你查看了 ROS 的日志输出,这通常可以通过运行
-
检查依赖关系:
- 确保
lifecycle_manager_navigation及其所有依赖项都已正确安装,并且版本兼容。 - 使用
rosdep来安装所有依赖项,或者查看package.xml文件中的<depend>标签来手动安装缺失的依赖。
- 确保
-
源代码审查:
- 如果你有权限访问
lifecycle_manager_navigation的源代码,检查报错的代码部分。 - 查看是否有明显的编程错误,如类型不匹配、未定义的变量等。
- 如果你有权限访问
-
环境配置:
- 确保你的 ROS 环境变量(如
ROS_MASTER_URI,ROS_HOSTNAME)配置正确。 - 检查是否所有的 ROS 节点都在同一个网络中,并且没有防火墙或网络策略阻止节点间的通信。
- 确保你的 ROS 环境变量(如
-
版本兼容性:
- 检查你使用的 ROS 版本(如 ROS 1 Noetic, ROS 2 Foxy 等)是否与
lifecycle_manager_navigation兼容。 - 如果可能,尝试使用不同的 ROS 版本或
lifecycle_manager_navigation的不同分支。
- 检查你使用的 ROS 版本(如 ROS 1 Noetic, ROS 2 Foxy 等)是否与
-
社区和文档:
- 查阅
lifecycle_manager_navigation的官方文档或 GitHub 仓库的 Issues 页面,看看是否有其他人遇到了类似的问题。 - 在 ROS 社区论坛或 Stack Overflow 上提问,提供尽可能多的错误信息和上下文。
- 查阅
-
构建和测试:
- 如果你对代码做了修改,确保重新构建你的工作空间:
catkin_make或colcon build。 - 在不同的机器或环境中测试你的配置,以排除特定环境的问题。
- 如果你对代码做了修改,确保重新构建你的工作空间:
如果你能提供具体的错误信息或更详细的描述,我可以提供更具体的帮助。希望这些步骤能帮助你解决问题!
以上为生成回答,仅供参考~
-