xacro简化urdf
-
按照b站鱼香ros ros2仿真教程进行学习时,遇到报错。
<?xml version="1.0"?> <robot xmlns:xacro="http://wiki.ros.org/xacro" name="first_robot"> <xacro:macro name="base_link" params="length radius"> <link name="base_link"> <!--部件的外观描述--> <visual> <!--沿着自己几何中心的偏移和旋转量--> <origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/> <!--几何形状--> <geometry> <cylinder radius="${radius}" length="${length}"/> </geometry> <!--材质颜色--> <material name="white"> <color rgba="1.0 1.0 1.0 0.5"/> </material> </visual> </link> </xacro:macro> <xacro:macro name="imu_link" params="imu_name xyz"> <!--机器人的IMU部件,惯性测量传感器--> <link name="${imu_name}_link"> <!--部件的外观描述--> <visual> <!--沿着自己几何中心的偏移和旋转量--> <origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/> <!--几何形状--> <geometry> <box size="0.02 0.0 0.0"/> </geometry> <!--材质颜色--> <material name="black"> <color rgba="0.0 0.0 1.0 0.5"/> </material> </visual> </link> </xacro:macro> <!--机器人的关节,用于组合机器人的部件--> <joint name="${imu_name}_joint" type="fixed"> <parent link="base_link" /> <child link="${imu_name}_link" /> <origin xyz="${xyz}" rpy="0.0 0.0 0.0" /> </joint> <xacro:base_link length="0.12" radius="0.1"/> <xacro:imu_link imu_name="imu_up" xyz="0.0 0.0 0.03"/> <xacro:imu_link imu_name="imu_down" xyz="0.0 0.0 -0.03"/> </robot>
-
在你提供的URDF(通过XACRO简化)文件中,存在几个问题导致它无法正确解析和编译。这些问题主要与XACRO宏的使用和XML的规范有关。下面是详细的问题和解决方案:
-
宏定义和调用的位置问题:
在XACRO中,宏的定义和调用必须遵守一定的结构。在你的代码中,joint标签是直接在robot标签下定义的,而它依赖于imu_link宏中的参数${imu_name}。由于joint标签不在宏内部,它无法访问imu_link宏中定义的参数。 -
解决方案:
- 你应该将
joint的定义放入imu_link宏中,或者创建一个新的宏来封装joint的定义,并在调用imu_link宏时调用这个新的joint宏。
- 你应该将
-
修改后的代码:
这里我将提供一个修改后的版本,其中创建了一个新的宏imu_joint来定义关节,并在imu_link宏中调用它。
<?xml version="1.0"?> <robot xmlns:xacro="http://wiki.ros.org/xacro" name="first_robot"> <xacro:macro name="base_link" params="length radius"> <link name="base_link"> <visual> <origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/> <geometry> <cylinder radius="${radius}" length="${length}"/> </geometry> <material name="white"> <color rgba="1.0 1.0 1.0 0.5"/> </material> </visual> </link> </xacro:macro> <xacro:macro name="imu_link" params="imu_name xyz"> <link name="${imu_name}_link"> <visual> <origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/> <geometry> <box size="0.02 0.0 0.0"/> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5"/> <!-- 修正颜色值,原值为蓝色 --> </material> </visual> </link> <xacro:macro name="imu_joint" params="imu_name xyz"> <joint name="${imu_name}_joint" type="fixed"> <parent link="base_link"/> <child link="${imu_name}_link"/> <origin xyz="${xyz}" rpy="0.0 0.0 0.0"/> </joint> </xacro:macro> <xacro:imu_joint imu_name="${imu_name}" xyz="${xyz}"/> </xacro:macro> <xacro:base_link length="0.12" radius="0.1"/> <xacro:imu_link imu_name="imu_up" xyz="0.0 0.0 0.03"/> <xacro:imu_link imu_name="imu_down" xyz="0.0 0.0 -0.03"/> </robot>注意:
- 我在
imu_link宏内部定义了一个新的宏imu_joint并立即调用它。这不是最佳实践,因为它使得imu_link宏变得复杂且难以重用。更好的做法是将imu_joint作为一个独立的宏定义在imu_link外部,并在需要时分别调用它们。 - 我修正了
imu_link中材质颜色的 RGBA 值,原值实际上是蓝色的(rgba="0.0 0.0 1.0 0.5"),如果你想要黑色,应使用rgba="0.0 0.0 0.0 0.5"。 - 在实际应用中,建议将关节的定义作为一个独立的宏,以便更灵活地重用。
希望这些修改能帮助你解决问题!
以上为生成回答,仅供参考~
-
-
@小伊 用你生成的代码之后报错
zmy@zmyTB:~/chapt6$ xacro /home/zmy/chapt6/chapt6_ws/src/fishbot_description/urdf/first_robot.xacro~
Traceback (most recent call last):
File "/opt/ros/humble/local/lib/python3.10/dist-packages/xacro/init.py", line 1012, in parse
inp = f = open(filename)
FileNotFoundError: [Errno 2] No such file or directory: '/home/zmy/chapt6/chapt6_ws/src/fishbot_description/urdf/first_robot.xacro~'During handling of the above exception, another exception occurred:
Traceback (most recent call last):
File "/opt/ros/humble/local/lib/python3.10/dist-packages/xacro/init.py", line 1119, in _process
doc = process_file(input_file_name, **opts)
File "/opt/ros/humble/local/lib/python3.10/dist-packages/xacro/init.py", line 1096, in process_file
doc = parse(None, input_file_name)
File "/opt/ros/humble/local/lib/python3.10/dist-packages/xacro/init.py", line 1016, in parse
raise XacroException(e.strerror + ": " + e.filename, exc=e)
xacro.XacroException: No such file or directory: /home/zmy/chapt6/chapt6_ws/src/fishbot_description/urdf/first_robot.xacro~ [Errno 2] No such file or directory: '/home/zmy/chapt6/chapt6_ws/src/fishbot_description/urdf/first_robot.xacro~'During handling of the above exception, another exception occurred:
Traceback (most recent call last):
File "/opt/ros/humble/bin/xacro", line 33, in <module>
sys.exit(load_entry_point('xacro==2.0.8', 'console_scripts', 'xacro')())
File "/opt/ros/humble/local/lib/python3.10/dist-packages/xacro/init.py", line 1171, in main
_process(input_file_name, vars(opts))
File "/opt/ros/humble/local/lib/python3.10/dist-packages/xacro/init.py", line 1124, in _process
except xml.parsers.expat.ExpatError as e:
AttributeError: module 'xml' has no attribute 'parsers' -
从您提供的错误信息中,可以看出存在几个问题:
-
文件路径错误:
您尝试打开的文件路径是/home/zmy/chapt6/chapt6_ws/src/fishbot_description/urdf/first_robot.xacro~,这个路径末尾有一个波浪号(~),这通常表示一个临时文件或备份文件。请检查您的文件是否确实是以~结尾,通常正确的文件扩展名应该是.xacro而不是.xacro~。您应该检查文件是否正确命名并位于指定的目录中。如果文件名为
first_robot.xacro,则命令应该是:xacro /home/zmy/chapt6/chapt6_ws/src/fishbot_description/urdf/first_robot.xacro -
Python环境问题:
错误信息中出现了AttributeError: module 'xml' has no attribute 'parsers',这通常意味着Python环境中有一些不兼容或损坏的库。这可能是由于Python版本或某些库的更新导致的。在ROS Humble中,通常使用的是Python 3.10。确保您的环境中安装的库与ROS Humble兼容。您可以尝试重新安装
xacro或相关依赖库,看是否能解决问题。使用以下命令尝试更新或重新安装xacro:sudo apt-get update sudo apt-get install --reinstall ros-humble-xacro如果问题仍然存在,您可能需要检查您的Python环境,确保没有其他版本的Python或库冲突。
-
执行环境:
确保您是在ROS的工作空间中执行这些命令,并且已经正确设置了环境变量。通常,您需要在执行xacro命令前激活ROS环境:source /opt/ros/humble/setup.bash
综上所述,首先检查文件路径和名称是否正确,然后尝试解决Python环境问题。如果问题仍然存在,请考虑查看更详细的ROS社区或论坛寻求帮助。
以上为生成回答,仅供参考~
-
-
@小伊
该问题已经解决,我想询问你一个新问题。
在urdf建模以及在rviz2中显示这个过程中,我跟着鱼香ros的b站教程操作,为什么我在保存config并且配置之后,config文件没有生效。import launch import launch_ros from ament_index_python.packages import get_package_share_directory import launch_ros.parameter_descriptions import os def generate_launch_description(): # 获取默认的urdf路径 urdf_package_path = get_package_share_directory('fishbot_description') default_urdf_path = os.path.join(urdf_package_path,'urdf','first_robot.urdf') default_rviz_config_path = os.path.join(urdf_package_path,'config','display_robot_model.rviz') # 声明一个urdf目录的参数,方便修改 action_declare_arg_mode_path = launch.actions.DeclareLaunchArgument( name='model',default_value=str(default_urdf_path),description='加载的模型文件路径' ) # 通过文件路径,获取内容,并转换成参数值对象,以供传入 robot_state_publisher substitutions_command_result = launch.substitutions.Command(['xacro ',launch.substitutions.LaunchConfiguration('model')]) robot_description_value = launch_ros.parameter_descriptions.ParameterValue(substitutions_command_result,value_type=str) action_robot_state_publisher = launch_ros.actions.Node( package='robot_state_publisher', executable='robot_state_publisher', parameters=[{'robot_description':robot_description_value}] ) action_joint_state_publisher = launch_ros.actions.Node( package='joint_state_publisher', executable='joint_state_publisher', ) action_rviz_node = launch_ros.actions.Node( package='rviz2', executable='rviz2', arguments=['-d', default_rviz_config_path] ) return launch.LaunchDescription( [ action_declare_arg_mode_path, action_robot_state_publisher, action_joint_state_publisher, action_rviz_node, ] )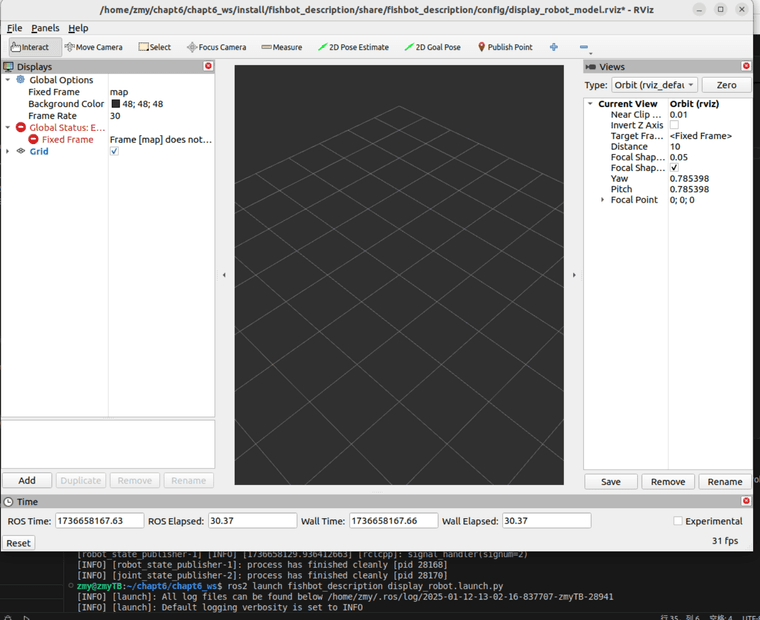
-
在ROS 2中使用URDF模型和RViz配置时,如果
config文件没有生效,可能有几个原因。以下是一些检查和调试的步骤,帮助你找出问题所在:-
确认URDF文件路径和名称:
- 确保
first_robot.urdf文件确实存在于fishbot_description/urdf/目录下。 - 检查URDF文件是否有语法错误,这可以通过使用
xacro命令行工具来预处理URDF文件来验证(例如,运行xacro fishbot_description/urdf/first_robot.urdf看是否有错误输出)。
- 确保
-
检查RViz配置文件:
- 确保
display_robot_model.rviz文件确实存在于fishbot_description/config/目录下。 - 打开RViz并手动加载这个配置文件,看看是否能正确显示模型。这可以帮助确认配置文件本身是否有问题。
- 确保
-
检查Launch文件:
- 你的Launch文件看起来是正确的,但有几个地方可以进一步检查:
- 确保
xacro命令在你的环境中是可用的,并且路径设置正确。 - 尝试在Launch文件中添加一些打印语句(虽然ROS 2的Launch系统不直接支持打印,但你可以通过日志输出或修改节点参数来间接实现)。
- 确保
- 你的Launch文件看起来是正确的,但有几个地方可以进一步检查:
-
运行时的参数和配置:
- 当你运行Launch文件时,确保没有覆盖默认的URDF路径或RViz配置路径。
- 检查ROS 2的终端输出,看是否有任何错误或警告信息。
-
环境变量和依赖:
- 确保所有相关的ROS 2包都已正确安装,并且环境变量(如
ROS_DOMAIN_ID)设置正确。 - 确保
ament_index_python和其他相关工具在你的Python环境中是可用的。
- 确保所有相关的ROS 2包都已正确安装,并且环境变量(如
-
使用绝对路径:
- 尝试在Launch文件中使用绝对路径而不是相对路径,这有时可以解决路径解析的问题。
-
调试和日志:
- 增加日志输出,特别是在处理文件和参数时。
- 检查RViz和ROS 2节点的日志输出,看是否有更详细的错误信息。
如果以上步骤都不能解决问题,你可能需要更详细地检查每个组件的配置和状态,或者考虑是否有可能是ROS 2或RViz的bug。在这种情况下,查看相关的GitHub仓库的issue页面或向社区求助可能是一个好主意。
以上为生成回答,仅供参考~
-
-
@小伊 Rviz中,文件名后缀出现*是为什么
-
在Rviz中,文件名后缀出现星号(*)通常不是Rviz软件本身的一个特性或标准表示。在多数编程和文件编辑软件中,文件名后缀或文件名前的星号往往表示该文件存在未保存的更改。例如,在某些文本编辑器或IDE(集成开发环境)中,如果一个文件被打开并进行了编辑但尚未保存,文件名旁边或前缀可能会出现一个星号,作为提醒用户有未保存的更改的视觉标志。
然而,就Rviz而言,它主要用于机器人的可视化,特别是与ROS(Robot Operating System,机器人操作系统)一起使用时。Rviz本身并不直接处理文件名的显示或编辑状态的标记。如果在Rviz环境中看到文件名后缀有星号,这可能并不是Rviz直接造成的,而是可能与以下情况有关:
- 外部编辑器或IDE:如果在使用Rviz的同时,也打开了同一个文件(例如URDF文件)在另一个编辑器或IDE中进行编辑,并且未保存更改,那么文件名前的星号可能是由该编辑器或IDE显示的。
- 文件系统或操作系统的特性:某些文件系统或操作系统可能会以特定方式标记未保存的文件,尽管这种情况较为少见,并且通常与特定的软件或环境配置有关。
- 自定义脚本或工具:在某些情况下,用户可能会使用自定义脚本或工具来监视文件更改,并通过在文件名后添加星号等方式来提供视觉反馈。
如果确定这个星号是与Rviz的使用相关的,并且不是由外部编辑器或IDE造成的,建议检查Rviz的配置和使用的环境,以确定是否有什么自定义的脚本或工具在影响文件名的显示。此外,也可以考虑查看Rviz的日志文件或输出信息,以获取更多关于此问题的线索。
总的来说,Rviz中文件名后缀出现星号通常不是Rviz的标准行为,而是可能与外部编辑器、文件系统特性或自定义脚本有关。
以上为生成回答,仅供参考~
-
<?xml version="1.0"?> <robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="fishbot"> <xacro:include filename="$(find fishbot_description)/urdf/fishbot/base.urdf.xacro"/> <!--传感器部分--> <xacro:include filename="$(find fishbot_description)/urdf/sensor/imu.urdf.xacro"/> <xacro:include filename="$(find fishbot_description)/urdf/sensor/camera.urdf.xacro"/> <xacro:include filename="$(find fishbot_description)/urdf/sensor/laser.urdf.xacro"/> <xacro:base_xacro length="0.12" radius="0.10"> </robot>zmy@zmyTB:~/chapt6/chapt6_ws$ xacro /home/zmy/chapt6/chapt6_ws/src/fishbot_description/urdf/fishbot/fishbot.urdf.xacro
XML parsing error: mismatched tag: line 11, column 2
when processing file: /home/zmy/chapt6/chapt6_ws/src/fishbot_description/urdf/fishbot/fishbot.urdf.xacroCheck that:
- Your XML is well-formed
- You have the xacro xmlns declaration: xmlns:xacro="http://www.ros.org/wiki/xacro"
-
XML解析错误提示“mismatched tag: line 11, column 2”表明在XML文件的第11行第2列处存在标签不匹配的问题。这通常意味着某个XML标签没有正确关闭,或者开启和关闭的标签不匹配。
在你的
fishbot.urdf.xacro文件中,错误可能是由于<xacro:base_xacro>标签的使用不正确导致的。<xacro:base_xacro>不是一个标准的XACRO或XML标签,看起来像是试图调用一个宏或函数,但实际上在XACRO中并没有预定义的base_xacro宏。如果你的意图是调用一个自定义的宏来设置机器人的一些基本属性(如长度和半径),你需要确保这个宏在base.urdf.xacro文件中被正确定义。解决步骤:
-
检查
base.urdf.xacro文件:- 确保
base.urdf.xacro文件中有一个名为base_xacro的宏定义,并且它接受length和radius作为参数。 - 如果
base_xacro宏不存在,你需要创建它,或者如果这是一个错误,应该替换为正确的标签或宏调用。
- 确保
-
修改
fishbot.urdf.xacro文件:- 如果
base_xacro是一个自定义宏,确保它的使用方式是正确的,并且所有参数都符合base.urdf.xacro中的定义。 - 如果
base_xacro不应该是一个宏调用,请将其替换为正确的XML或XACRO结构。
- 如果
-
重新运行XACRO:
- 在修改完文件后,重新运行XACRO命令来生成URDF文件,看是否还会出现错误。
-
检查其他潜在的XML错误:
- 确保所有的XML标签都正确关闭。
- 确保所有的XACRO宏调用都正确无误,并且所有引用的文件路径都是正确的。
如果上述步骤仍然无法解决问题,可能需要更详细地检查整个XML/XACRO文件的结构,或者考虑是否有其他软件或配置问题影响了XACRO的解析。
以上为生成回答,仅供参考~
-
-
@小伊 Traceback (most recent call last):
File "/opt/ros/humble/local/lib/python3.10/dist-packages/xacro/init.py", line 1012, in parse
inp = f = open(filename)
FileNotFoundError: [Errno 2] No such file or directory: '/home/phx/chapt7/ros2bookcode/chapt6/chapt6_ws/src/fishbot_description/urdf/first_robot.xacro'During handling of the above exception, another exception occurred:
Traceback (most recent call last):
File "/opt/ros/humble/local/lib/python3.10/dist-packages/xacro/init.py", line 1119, in _process
doc = process_file(input_file_name, **opts)
File "/opt/ros/humble/local/lib/python3.10/dist-packages/xacro/init.py", line 1096, in process_file
doc = parse(None, input_file_name)
File "/opt/ros/humble/local/lib/python3.10/dist-packages/xacro/init.py", line 1016, in parse
raise XacroException(e.strerror + ": " + e.filename, exc=e)
xacro.XacroException: No such file or directory: /home/phx/chapt7/ros2bookcode/chapt6/chapt6_ws/src/fishbot_description/urdf/first_robot.xacro [Errno 2] No such file or directory: '/home/phx/chapt7/ros2bookcode/chapt6/chapt6_ws/src/fishbot_description/urdf/first_robot.xacro'During handling of the above exception, another exception occurred:
Traceback (most recent call last):
File "/opt/ros/humble/bin/xacro", line 33, in <module>
sys.exit(load_entry_point('xacro==2.0.8', 'console_scripts', 'xacro')())
File "/opt/ros/humble/local/lib/python3.10/dist-packages/xacro/init.py", line 1171, in main
_process(input_file_name, vars(opts))
File "/opt/ros/humble/local/lib/python3.10/dist-packages/xacro/init.py", line 1124, in _process
except xml.parsers.expat.ExpatError as e:
AttributeError: module 'xml' has no attribute 'parsers'