无法定位ros-control和roscontroller的问题
-
roscore可以正常启动,我不太知道我这是已经安装好了还是没装,我记得如果安装好的话再输入apt-get不会显示找不到包呀。这个问题怎么解决呀?
-
针对您提到的无法定位
ros-control和ros_controllers的问题,同时roscore可以正常启动,这通常意味着ROS的基本系统已经安装完成,但可能缺少某些特定的功能包或存在环境配置问题。以下是一些解决步骤和建议:-
确认ROS版本:
首先,确认您安装的ROS版本(如Indigo、Melodic、Kinetic等),因为不同版本的ROS可能有不同的包管理方式和依赖关系。 -
检查软件包名称:
对于ros-control和ros_controllers,确保您使用的软件包名称与您的ROS版本相匹配。例如,在Indigo版本中,您可能需要安装ros-indigo-ros-control、ros-indigo-effort-controllers和ros-indigo-joint-state-controller等包。 -
使用apt-get或aptitude安装:
- 使用
apt-get安装:尝试使用以下命令安装所需的软件包(以Indigo版本为例):sudo apt-get update sudo apt-get install ros-indigo-ros-control ros-indigo-effort-controllers ros-indigo-joint-state-controller - 如果
apt-get无法找到这些包,可能是因为您的软件源列表中没有包含ROS的软件仓库。请确保您的/etc/apt/sources.list或/etc/apt/sources.list.d/目录下的文件中包含了正确的ROS软件仓库地址。 - 使用
aptitude尝试:有时aptitude在处理依赖关系上比apt-get更智能。您可以先安装aptitude,然后使用它来尝试安装所需的软件包:sudo apt-get install aptitude sudo aptitude install ros-indigo-ros-control ros-indigo-effort-controllers ros-indigo-joint-state-controller
- 使用
-
检查环境变量:
确保您的.bashrc或.zshrc文件中包含了正确的ROS环境变量设置。这通常包括source ROS的setup.bash文件,例如:source /opt/ros/indigo/setup.bash之后,运行
source ~/.bashrc或重新打开终端以使更改生效。 -
重新编译工作空间:
如果您已经有一个ROS工作空间,并且在此工作空间中引用了ros-control和ros_controllers,请确保您的工作空间已经正确设置,并且您已经运行了catkin_make或catkin build来编译您的代码。 -
检查CMakeLists.txt文件:
如果您的ROS包中包含了CMakeLists.txt文件,请确保该文件中的find_package指令正确引用了ros_control和ros_controllers。例如:find_package(catkin REQUIRED COMPONENTS ros_control ros_controllers ) -
查看错误日志:
如果上述步骤都无法解决问题,请仔细查看编译过程中的错误日志,以获取更多关于问题的详细信息。这可能会帮助您定位问题所在。
遵循这些步骤应该可以帮助您解决无法定位
ros-control和ros_controllers的问题。如果问题仍然存在,请考虑查看ROS社区论坛或寻求更专业的帮助。
以上为生成回答,仅供参考~
-
-
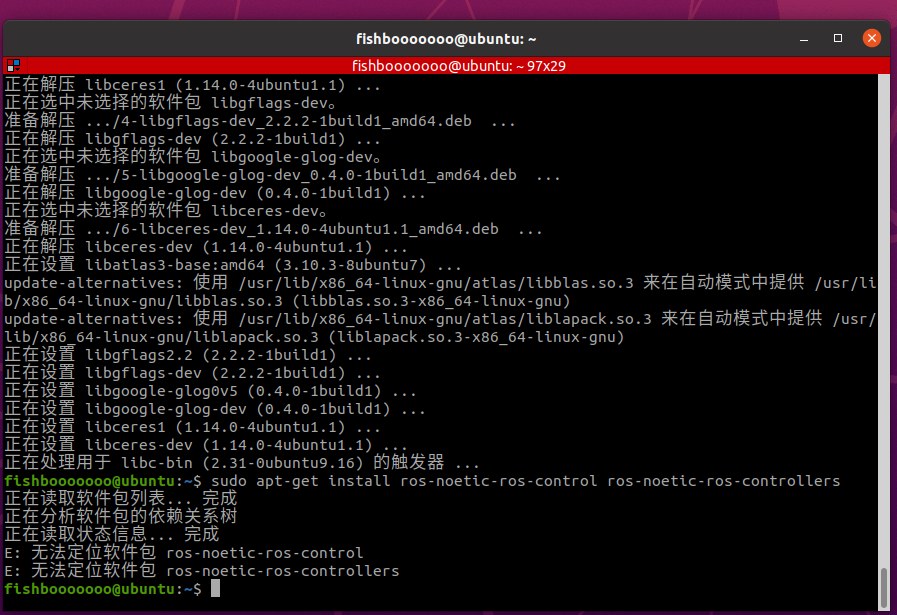
@小伊 无法定位软件包 ros-noetic-ros-control怎么解决
-
遇到“无法定位软件包 ros-noetic-ros-control”这类问题时,通常意味着你的ROS(Robot Operating System)环境中的软件包索引没有包含你想要安装的包,或者你的系统没有正确配置以访问这些包。以下是一些解决这个问题的步骤:
-
确认ROS版本和发行版:
确保你正在使用的是ROS Noetic Ninjemys,因为ros-noetic-ros-control是专为ROS Noetic设计的。如果你使用的是其他版本的ROS(如Melodic, Kinetic等),你将无法安装ros-noetic-ros-control。 -
更新你的软件包索引:
打开终端,运行以下命令来更新你的APT软件包索引:sudo apt update -
添加ROS Noetic的源:
如果你还没有添加ROS Noetic的官方源到你的系统,你需要先添加。可以通过以下命令添加ROS Noetic的源到你的/etc/apt/sources.list文件,并添加密钥:sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654注意:确保将
$(lsb_release -sc)替换为你的Ubuntu发行版名称(对于Ubuntu 20.04,它将是focal)。 -
再次更新软件包索引:
添加源之后,再次运行更新命令:sudo apt update -
尝试安装ros-control:
现在,你应该能够安装ros-noetic-ros-control了:sudo apt install ros-noetic-ros-control -
检查你的网络设置:
如果你仍然遇到问题,可能是因为你的网络设置(如代理、VPN等)阻止了APT访问ROS的服务器。确保你的网络设置允许你的系统访问http://packages.ros.org。 -
查看依赖问题:
如果安装失败并提示依赖问题,尝试使用apt --fix-broken命令来修复依赖问题。 -
手动下载和安装:
如果上述方法都不奏效,你可以尝试从ROS的源代码仓库手动下载并编译ros_control。
遵循这些步骤应该能帮助你解决“无法定位软件包 ros-noetic-ros-control”的问题。如果问题仍然存在,可能需要检查更详细的系统日志或寻求ROS社区的帮助。
以上为生成回答,仅供参考~
-
-
@FishBoooooooo 目前解决了,换了ROS官方软件源,然后sudo apt update一下之后就可以找到包了
