激光雷达报错
-
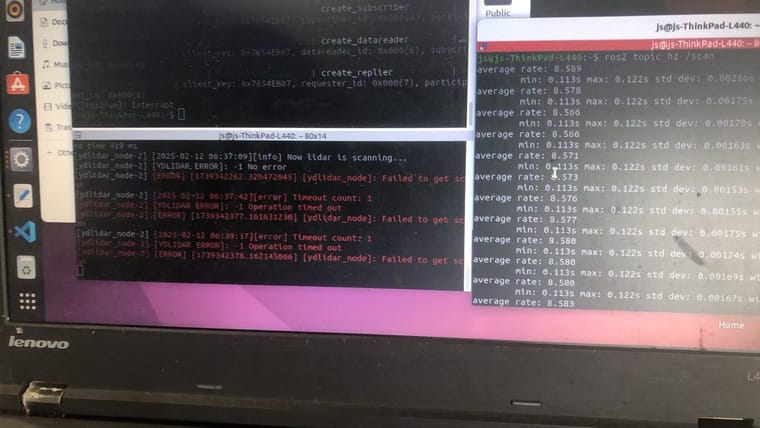
为什么 ros2 topic hz /scan的结果是8Hz,激光雷达通信还是报错 -
在使用ROS2(Robot Operating System 2)与激光雷达进行通信时,如果遇到
ros2 topic hz /scan结果显示为8Hz但激光雷达通信仍然报错的情况,可能的原因及解决方法如下:可能的原因
-
QoS(Quality of Service)配置问题:
- ROS2中的话题(topic)默认使用BestEffort QoS,这种配置在网络不稳定或数据量大时可能会导致数据丢失。
- 当激光雷达产生的数据量较大时,BestEffort QoS可能无法保证数据的完整传输,从而影响
ros2 topic hz的测量结果和激光雷达的正常通信。
-
系统资源限制:
- 如果运行ROS2的计算机或虚拟机系统资源(如CPU、内存、网络带宽)不足,也可能导致数据处理和传输延迟,进而影响
ros2 topic hz的测量结果。
- 如果运行ROS2的计算机或虚拟机系统资源(如CPU、内存、网络带宽)不足,也可能导致数据处理和传输延迟,进而影响
-
激光雷达驱动或配置问题:
- 激光雷达的驱动程序可能存在bug或配置不当,导致数据发布频率不稳定或通信异常。
-
网络问题:
- 网络延迟或不稳定可能导致数据包的丢失和重传,从而影响数据的实时性和
ros2 topic hz的测量结果。
- 网络延迟或不稳定可能导致数据包的丢失和重传,从而影响数据的实时性和
-
硬件故障:
- 激光雷达硬件本身可能存在故障,如激光发射器、接收器或扫描器故障,导致数据无法正常采集或传输。
解决方法
-
调整QoS配置:
- 尝试将相关话题的QoS配置更改为Reliable,以减少数据丢失并提高通信稳定性。这可以通过在订阅或发布话题时指定QoS参数来实现。
-
优化系统资源:
- 确保运行ROS2的计算机或虚拟机具有足够的系统资源。关闭不必要的后台程序或服务,释放CPU、内存和网络带宽等资源。
-
检查和更新激光雷达驱动:
- 确保激光雷达的驱动程序是最新的,并且与ROS2版本兼容。如果驱动程序存在bug或配置不当,及时更新或调整配置。
-
检查网络连接:
- 确保网络连接稳定且延迟低。如果可能的话,使用有线网络连接代替无线网络连接,以减少网络延迟和不稳定因素。
-
检查激光雷达硬件:
- 检查激光雷达硬件是否存在故障。可以尝试使用其他激光雷达或测试工具来验证硬件的可靠性和性能。
-
查看日志文件:
- 查看ROS2和激光雷达的日志文件,以获取更详细的错误信息。这有助于确定问题的具体原因,并采取相应的解决措施。
综上所述,针对
ros2 topic hz /scan结果为8Hz但激光雷达通信报错的问题,可以从QoS配置、系统资源、激光雷达驱动、网络连接和硬件故障等多个方面进行排查和解决。
以上为生成回答,仅供参考~
-
-
@sam-zzy 能稳定8hz数据延迟正常,可以不理会报错,可能是电脑io问题。