激光雷达点云坐标系变换问题和里程计问题
-
 !
!
[40ccebdd01947e9c4a801e39c8c2fc7.jpg]
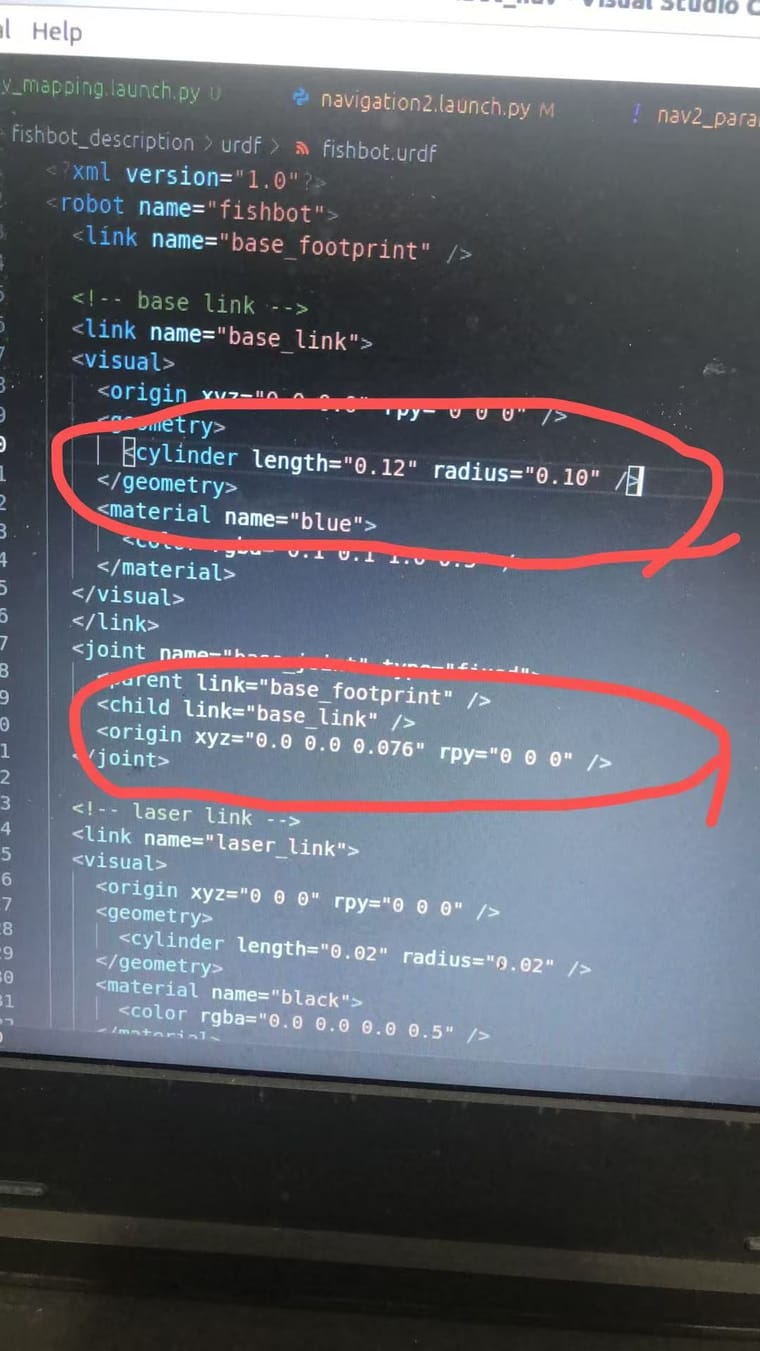
这个地方和实物四驱机器人对应不上,会影响里程计坐标数据吗(/forum/assets/uploads/files/1739430421941-40ccebdd01947e9c4a801e39c8c2fc7-resized.jpg)
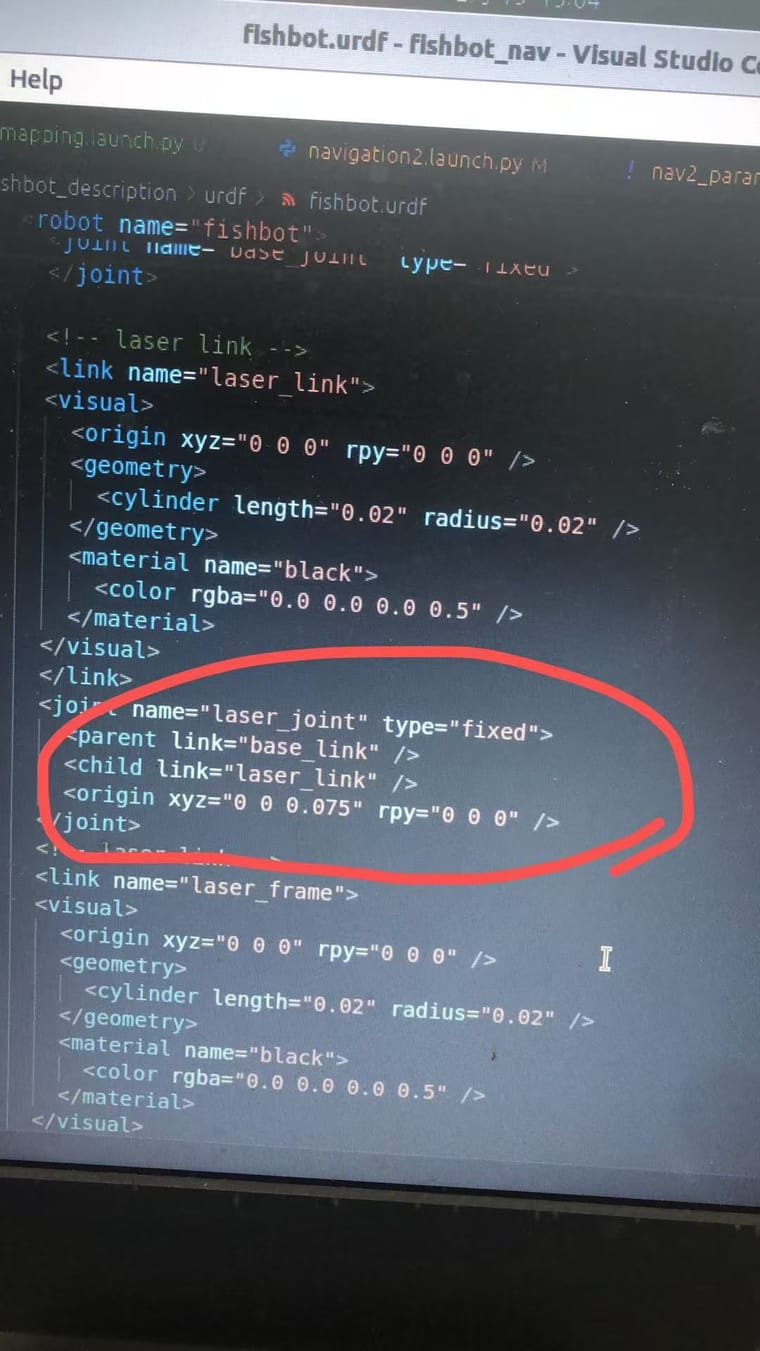
这个地方数据和实物四驱机器人对不上,会影响激光雷达数据建图和导航准确性吗。 -
当激光雷达点云坐标系与实物四驱机器人对应不上时,这确实可能会对里程计坐标数据、激光雷达数据建图以及导航准确性产生影响。以下是对这些影响的详细分析:
对里程计坐标数据的影响
里程计通常用于估计车辆或机器人的运动状态,包括位置和方向的变化。在无人驾驶或机器人导航系统中,里程计数据是至关重要的。如果激光雷达点云坐标系与实物机器人对应不上,那么基于这些点云数据进行的里程计估算就可能存在误差。这种误差可能源于坐标系的错位或变换不准确,导致里程计输出的位置和方向信息与实际情况不符。
对激光雷达数据建图的影响
激光雷达通过发射激光束并接收反射回来的信号来生成环境的三维点云数据。这些数据被用于构建环境地图,以支持导航和定位功能。如果激光雷达点云坐标系与实物机器人对应不上,那么生成的点云数据就可能存在偏差或失真。这会影响环境地图的准确性和完整性,进而影响到机器人在该环境中的导航性能。
对导航准确性的影响
导航准确性依赖于多个因素,包括里程计数据的准确性、环境地图的精确性以及传感器数据的融合效果等。如果激光雷达点云坐标系与实物机器人对应不上,那么这些因素都可能受到影响,从而导致导航准确性下降。例如,由于坐标系错位导致的里程计误差和环境地图失真可能会使机器人在导航过程中偏离预定路径或无法准确识别障碍物。
解决方案
为了解决这个问题,可以采取以下措施:
- 校准坐标系:确保激光雷达点云坐标系与实物四驱机器人正确对应。这可能需要通过校准过程来调整坐标系的变换参数,以确保数据的准确性和一致性。
- 优化里程计算法:采用更精确的里程计算法来减少误差。例如,可以使用基于点云配准技术的算法(如ICP算法)来估计车辆或机器人的运动状态。
- 增强数据融合效果:将激光雷达数据与其他传感器数据(如IMU、轮速计等)进行融合,以提高导航系统的鲁棒性和准确性。通过融合多种传感器数据,可以相互补充和校验,从而减少单一传感器数据带来的误差。
综上所述,激光雷达点云坐标系与实物四驱机器人对应不上确实会对里程计坐标数据、激光雷达数据建图以及导航准确性产生影响。因此,需要采取相应的措施来确保坐标系的正确对应和数据的一致性,以提高导航系统的性能和准确性。
以上为生成回答,仅供参考~
-
@sam-zzy 会有一点点轻微影响,可以将雷达部分的 origin x 从 0 改为 -0.105 即可去除