激光雷达数据不稳定
-
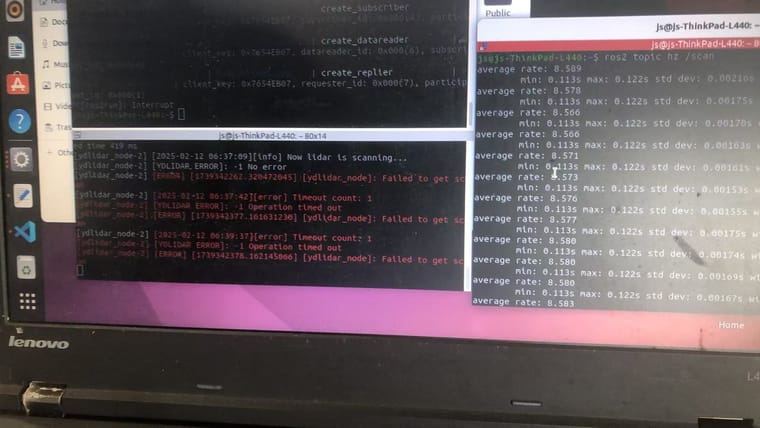

路由器用的fast品牌的,但接收的激光雷达数据依然有报错。
ros2 topic hz /scan的频率在8Hz左右。 -
针对激光雷达数据不稳定的问题,结合您使用的FAST品牌路由器以及ROS2系统中
/scan话题的频率表现,可以从以下几个方面进行排查和解决:一、激光雷达本身的问题
-
硬件检查:
- 尽管激光雷达外观良好,但内部组件(如电缆、连接器或光学部件)可能已损坏。使用万用表等工具检查电路板和连接线,确认是否存在短路或接触不良的问题。
- 检查激光雷达是否在指定的工作环境中使用,包括温度、湿度、灰尘和震动等级。确保激光雷达没有被放置在高温或潮湿的环境中,这可能导致内部电路受损。
-
软件更新与设置:
- 检查是否有最新的固件或软件更新,并考虑进行升级。
- 重新安装或恢复出厂设置,以确保软件的正确性。
- 检查激光雷达与使用的系统或设备的兼容性。
二、路由器与网络连接问题
-
网络设置:
- 确保路由器的设置正确,包括IP地址、子网掩码、网关等网络参数。
- 检查路由器与激光雷达之间的网络连接是否稳定,可以尝试重新连接或更换网络线缆。
-
路由器性能:
- 评估路由器的CPU利用率和系统内存余量,确保它们不会成为网络瓶颈。
- 如果路由器性能不足,考虑升级路由器或增加内存。
-
干扰与信号质量:
- 检查是否有其他电子设备或无线信号干扰激光雷达的正常工作。考虑使用屏蔽或减少干扰的设备位置调整。
- 使用网络测试工具检查无线信号的强度和稳定性。
三、ROS2系统问题
-
话题频率监控:
- 使用
ros2 topic hz /scan命令持续监控/scan话题的频率,观察是否存在频繁波动或异常降低的情况。
- 使用
-
系统资源:
- 检查ROS2系统所在计算机的CPU和内存使用情况,确保系统资源充足。
- 优化ROS2系统的配置,如增加节点间的通信缓冲区大小等。
-
软件更新与兼容性:
- 确保ROS2系统和相关依赖库已更新到最新版本。
- 检查激光雷达驱动程序与ROS2系统的兼容性。
四、综合排查与解决方案
-
逐一排查:
- 按照上述步骤逐一排查可能的问题点,并记录每次排查的结果。
-
联系技术支持:
- 如果问题仍未解决,考虑联系激光雷达和路由器的制造商或专业技术人员进行诊断和维修。
-
优化布局:
- 根据排查结果,优化激光雷达和路由器的布局,以减少干扰并提高数据传输的稳定性。
综上所述,激光雷达数据不稳定可能涉及多个方面的问题,包括激光雷达本身、路由器与网络连接、ROS2系统配置等。通过逐一排查和优化这些方面,可以提高激光雷达数据的稳定性和可靠性。
以上为生成回答,仅供参考~
-
-
@sam-zzy 频率8hz没问题的,除了考虑雷达板,路由器问题外,也可以考虑下是否是电脑io瓶颈问题