里程计标定问题
-
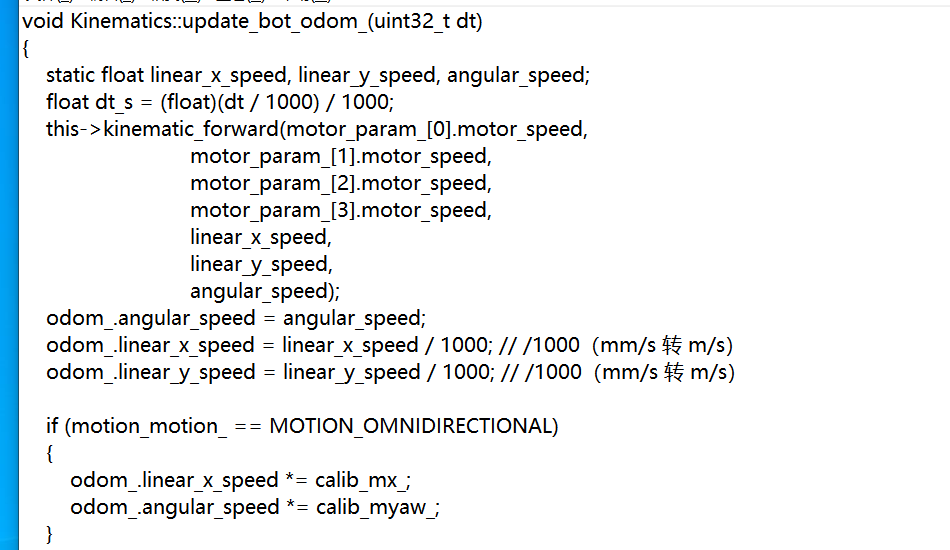
为什么这里的里程计使用的的是小车局部坐标系下的线速度和角速度。
里程计的线速度和角速度不应该实在全局坐标系下的吗。 -
在探讨里程计使用的线速度和角速度为何是在小车局部坐标系下而非全局坐标系下的问题时,我们首先要理解里程计的工作原理及其应用场景。
里程计的工作原理
里程计是一种利用从移动传感器(如安装在车轮上的编码器或惯性测量单元IMU)获得的数据来估计物体位置随时间变化的方法。在ROS(机器人操作系统)中,里程计信息通常包括位姿(位置和姿态)和速度(线速度和角速度)两部分。这些数据主要来源于车轮的编码器和IMU传感器。
局部坐标系与全局坐标系
- 局部坐标系:也称为车身坐标系或载体坐标系,是固定于移动平台上(如小车)并与之一起运动的坐标系。在这个坐标系中,里程计测量的线速度和角速度是基于小车自身的运动状态得出的。
- 全局坐标系:也称为世界坐标系,是定义全局参考框架的坐标系,在此框架下表示所有物体的位置和姿态。
为什么使用局部坐标系下的线速度和角速度
- 直接测量:里程计通常通过安装在车轮上的编码器或IMU传感器直接测量小车的运动状态。这些传感器提供的数据是基于小车自身的局部坐标系的。
- 实时性与准确性:在局部坐标系下测量线速度和角速度可以实时反映小车的运动状态,且由于测量是在小车自身上进行的,因此相对准确。如果将这些数据转换到全局坐标系下,可能会引入额外的转换误差和计算复杂度。
- 便于导航与控制:在机器人自主导航和实时状态估计中,使用局部坐标系下的线速度和角速度可以更方便地进行路径规划和运动控制。
全局坐标系下的应用
虽然里程计在局部坐标系下测量线速度和角速度,但这些数据在需要时可以通过坐标变换转换到全局坐标系下,以进行更广泛的应用,如地图构建、全局路径规划等。
综上所述,里程计使用的线速度和角速度是在小车局部坐标系下的,这是基于直接测量的便利性、实时性与准确性以及便于导航与控制的考虑。在需要时,这些数据可以通过适当的坐标变换转换到全局坐标系下以满足更广泛的应用需求。
以上为生成回答,仅供参考~
-
@sam-zzy 小车只有线速度和角速度,在里程计坐标系下的