安装激光雷达C16驱动的问题
-
-
针对激光雷达C16(以镭神智能的C16为例)驱动的安装问题,以下提供详细的安装步骤和注意事项:
一、硬件连接与IP设置
-
硬件连接
- 连接雷达网络接口和电源线。手册上要求电源为9~48VDC,一般12V即可。
- 根据雷达设置的目标IP设置电脑有线连接IP。可用ifconfig命令查看有线IP是否设置成功。雷达出厂默认目的IP为192.168.1.102,但可能需要根据雷达实际配置进行修改。
- 雷达上电启动后,观察电脑有线连接图标是否连接正常。
- 打开终端,ping雷达IP,测试硬件是否连接正常。若ping通则正常,否则检查硬件连接。雷达IP可能默认为192.168.1.200。
- 可进一步使用命令(如sudo tcpdump -n -i eth0,其中eth0为有线网络设备名)查看雷达发送数据包情况,若雷达发送到目的端数据包为1206个字节,则表示雷达数据发送正常。备注:第一次设置IP后,请重启雷达电源。
-
修改IP
- 修改网络链接IP与设备IP在同一网段下。
- 打开相关launch文件(如leishen_ws/src/Lslidar_ROS1_driver/lslidar_c16_decoder/launch/lslidar_c16.launch)。
- 发现设备IP后,插上网线与设备连接,然后打开有线网络设置进行相应的修改。
- 可以下载一个网络抓包工具(如Wireshark)查看IP是否设置好。
二、驱动安装
-
建立工作空间
- 创建并进入工作空间目录,例如:mkdir -p ~/leishen_ws/src && cd ~/leishen_ws/src。
-
下载驱动
- 从GitHub等网站下载适用于C16的ROS驱动源码,例如:git clone [相关驱动仓库链接]。注意选择与ROS版本以及设备型号相匹配的驱动。
-
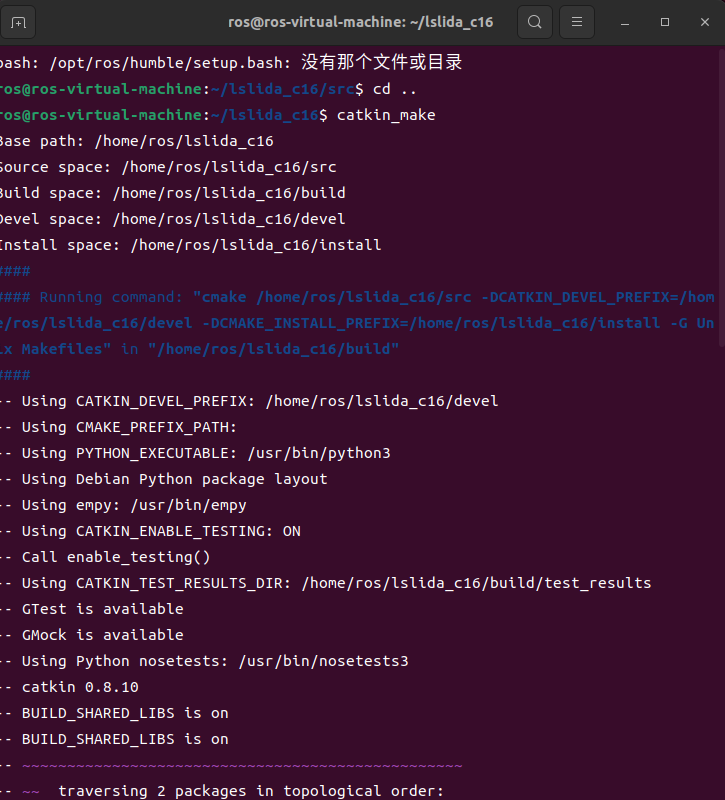
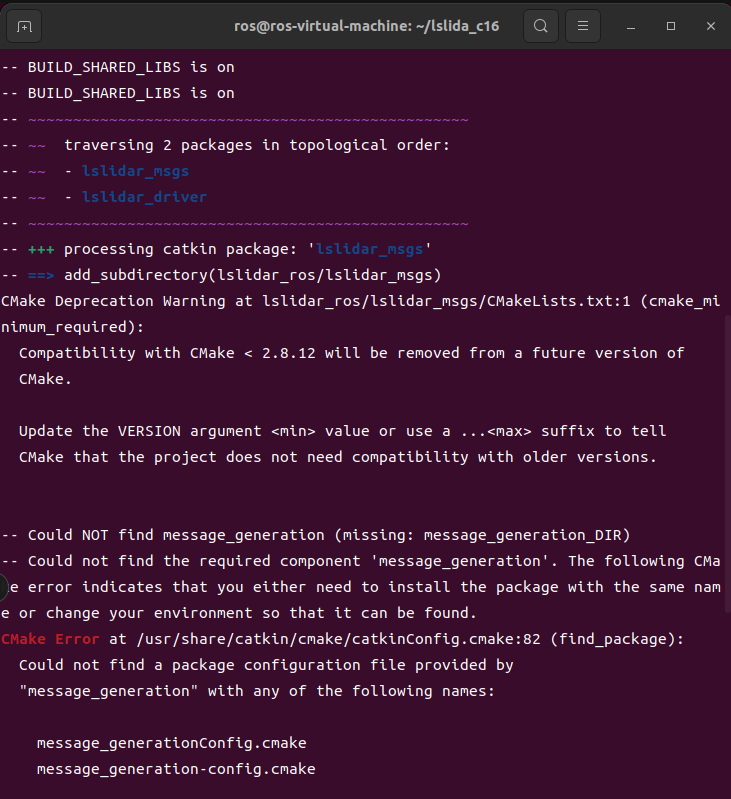
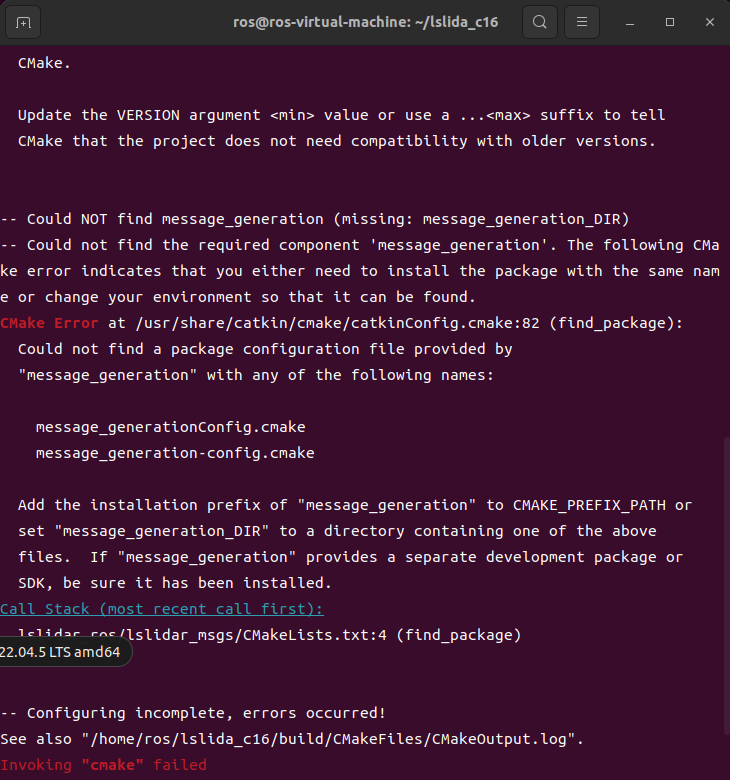
编译驱动
- 退到工作空间根目录,例如:cd ~/leishen_ws。
- 执行catkin_make命令进行编译。如果遇到依赖问题(如找不到pcap.h),需要安装相应的依赖库,例如使用sudo apt-get install libpcap-dev命令安装pcap库。
- 编译完成后,执行source devel/setup.bash命令使编译生成的setup.bash文件生效。
三、启动驱动与查看点云
-
启动驱动
- 使用roslaunch命令启动激光雷达的launch文件,例如:roslaunch lslidar_c16_decoder lslidar_c16.launch。如果修改了雷达目的端口及转速,请打开相应的launch文件进行相应的修改配置。
-
查看点云
- 打开rviz工具。
- 在rviz的Displays窗口中,将“Fixed Frame”的值修改成laser_link。
- 点击add按钮,在By topic下点击PointCloud2添加多线点云节点。此时应该可以看到激光雷达检测到的点云数据。
四、注意事项
- 在安装和配置过程中,请确保所有步骤都按照官方文档或可靠来源的指南进行。
- 如果遇到任何问题,请查阅官方文档、社区论坛或联系技术支持以获取帮助。
- 在使用激光雷达时,请注意安全事项,避免对人员或设备造成伤害。
通过以上步骤,应该能够成功安装并配置激光雷达C16的驱动,并在ROS环境下查看点云数据。
以上为生成回答,仅供参考~
-