里程计问题
-
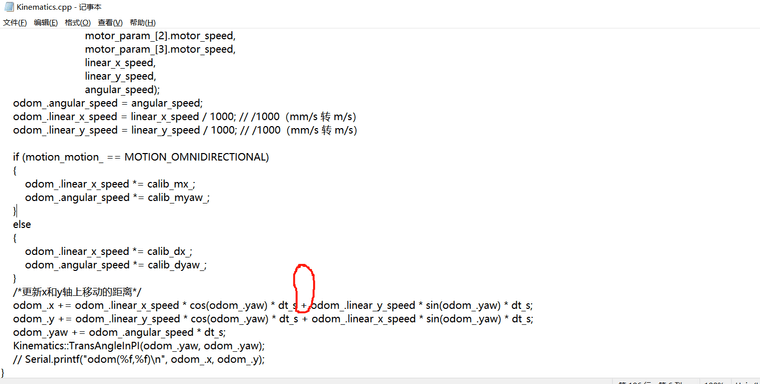
为什么红色标注的地方不是减号,这里的坐标系变换的数学关系可以秒速一下吗? -
在处理里程计(Odometry)数据时,尤其是在机器人定位与导航领域,经常会遇到坐标系变换的问题。你提到的红色标注的地方不是减号,这很可能是因为在进行坐标变换时,我们实际上是在处理旋转和平移的组合,这通常涉及到矩阵运算,而非简单的加减。
坐标系变换的基本数学关系
-
平移(Translation):
平移通常表示为向量加法。如果我们有一个点P在坐标系A中的坐标为(x, y),将其平移到坐标系B中,平移向量为(Δx, Δy),则新的坐标可以通过向量加法得到。但在里程计中,当我们谈论从一个位置到另一个位置的移动时,我们可能更关心的是相对位置的变化,这通常通过向量减法(末位置减初位置)来表示位移。 -
旋转(Rotation):
旋转涉及到角度和方向的改变。在二维平面上,一个点绕原点旋转θ角度可以通过旋转矩阵来实现。例如,一个点(x, y)绕原点逆时针旋转θ角度后的新坐标(x', y')可以通过以下旋转矩阵得到:
[
\begin{bmatrix}
x' \
y'
\end{bmatrix}\begin{bmatrix}
\cos\theta & -\sin\theta \
\sin\theta & \cos\theta
\end{bmatrix}
\begin{bmatrix}
x \
y
\end{bmatrix}
] -
组合变换:
在实际应用中,一个物体的运动往往同时包含平移和旋转。这时,我们需要先应用旋转矩阵,再进行平移(或者先平移再旋转,但结果可能不同,这取决于具体的变换顺序和参考系)。这种组合变换通常通过齐次坐标和4x4的变换矩阵来实现,以便同时处理旋转和平移。
为什么不是减号?
在处理里程计数据时,特别是当涉及到从一个坐标系变换到另一个坐标系时,我们通常会遇到形如
R * P + T的表达式,其中R是旋转矩阵,P是点的坐标向量,T是平移向量。这里的+号表示在进行旋转之后进行平移的累加效果,而不是简单的坐标减法。坐标减法通常用于计算两点之间的相对位置或位移。因此,如果你在里程计或坐标变换的上下文中看到红色标注的地方不是减号,那很可能是因为那里正在进行的是旋转和平移的组合变换,而不是在计算两点之间的相对位置。
希望这能帮助你理解里程计中坐标系变换的数学关系!如果你有更具体的例子或上下文,提供详细信息可能会得到更精确的解释。
以上为生成回答,仅供参考~
-
-
@sam-zzy 因为线速度角速度是向量