用树莓派4b+鱼香小车主控+雷达+奥比中光深度摄像头+ubuntu22桌面版搭建移动小车
-
你的帖子已经详细记录了如何使用树莓派4B、鱼香小车主控、雷达、奥比中光深度摄像头以及Ubuntu 22.04桌面版来搭建一个移动小车系统。不过,对于AI视频避障的集成,这里有一些建议,可以进一步优化和扩展你的系统:
-
AI视频避障框架:
- 使用像TensorFlow Lite、PyTorch Mobile或ONNX Runtime这样的轻量级深度学习框架,在树莓派上运行AI模型来进行实时避障。
- 选择一个预训练的障碍物检测模型(如YOLO、SSD、Faster R-CNN等),并转换为树莓派可以运行的格式(如TFLite)。
-
模型优化和转换:
- 使用模型优化工具(如TensorFlow Lite的优化器)来减小模型大小和提高推理速度。
- 将预训练的模型从原始框架(如TensorFlow、PyTorch)转换为树莓派支持的格式。
-
视频流处理:
- 使用ROS2的摄像头驱动来从奥比中光摄像头获取视频流。
- 将视频流传递给AI模型进行实时处理。
-
集成到ROS2:
- 将AI避障模块作为ROS2节点来实现,这样它就可以与其他ROS2节点(如导航、控制等)进行通信。
- 编写ROS2服务或订阅/发布机制,以便AI避障模块可以接收控制命令并发布避障决策。
-
测试与调优:
- 在不同的环境和光照条件下测试AI避障系统的性能。
- 根据测试结果调整模型参数、阈值或采用其他优化策略。
-
使用ROS2的导航栈:
- 集成ROS2的导航栈(如Nav2)到你的系统中,以便利用AI避障结果来进行更复杂的导航任务。
- 配置Nav2的costmap以考虑AI避障模块的决策。
-
硬件优化:
- 考虑使用USB 3.0接口来连接摄像头,以获得更高的数据传输速率。
- 如果树莓派的性能不足,可以考虑使用更强大的硬件(如NVIDIA Jetson系列)来运行AI模型。
-
文档和分享:
- 记录你的集成过程和遇到的挑战,以便其他人可以从中受益。
- 在开源社区(如GitHub、ROS论坛等)分享你的代码和解决方案。
最后,记住,硬件和软件的集成是一个迭代的过程,可能需要多次尝试和优化才能达到最佳效果。希望这些建议能对你有所帮助!
以上为生成回答,仅供参考~
-
-
-
@小鱼 鱼大,有空把集成教程做一个啊,好歹在一个rviz上集成吧,或者给个思路
-
--- stderr: astra_camera
CMake Error at /usr/share/cmake-3.16/Modules/CMakeFindDependencyMacro.cmake:47 (find_package):
By not providing "FindUnwind.cmake" in CMAKE_MODULE_PATH this project has
asked CMake to find a package configuration file provided by "Unwind", but
CMake did not find one.Could not find a package configuration file provided by "Unwind" (requested
version 1.2.1) with any of the following names:UnwindConfig.cmake unwind-config.cmakeAdd the installation prefix of "Unwind" to CMAKE_PREFIX_PATH or set
"Unwind_DIR" to a directory containing one of the above files. If "Unwind"
provides a separate development package or SDK, be sure it has been
installed.
Call Stack (most recent call first):
/usr/local/lib/cmake/glog/glog-config.cmake:25 (find_dependency)
CMakeLists.txt:23 (find_package)
Failed <<< astra_camera [3.28s, exited with code 1]
Aborted <<< libuvc [4.85s] -
奥比中光怎么放啊那么大个摄像头不会挡住激光雷达吗
-
@lvjiaming2007 应该是有些依赖没安装,你要看你下载的sdk里面的readme,有相应步骤和依赖要求,还有sdk版本对应的硬件型号
-
@2075605318 激光雷达装在摄像头上面啊,而且我的是pro,不大
-
@17171680-1 大佬你怎么固定的,我用fishbot那个模型固定不上去阿,可以发个图片麻
-
@2075605318
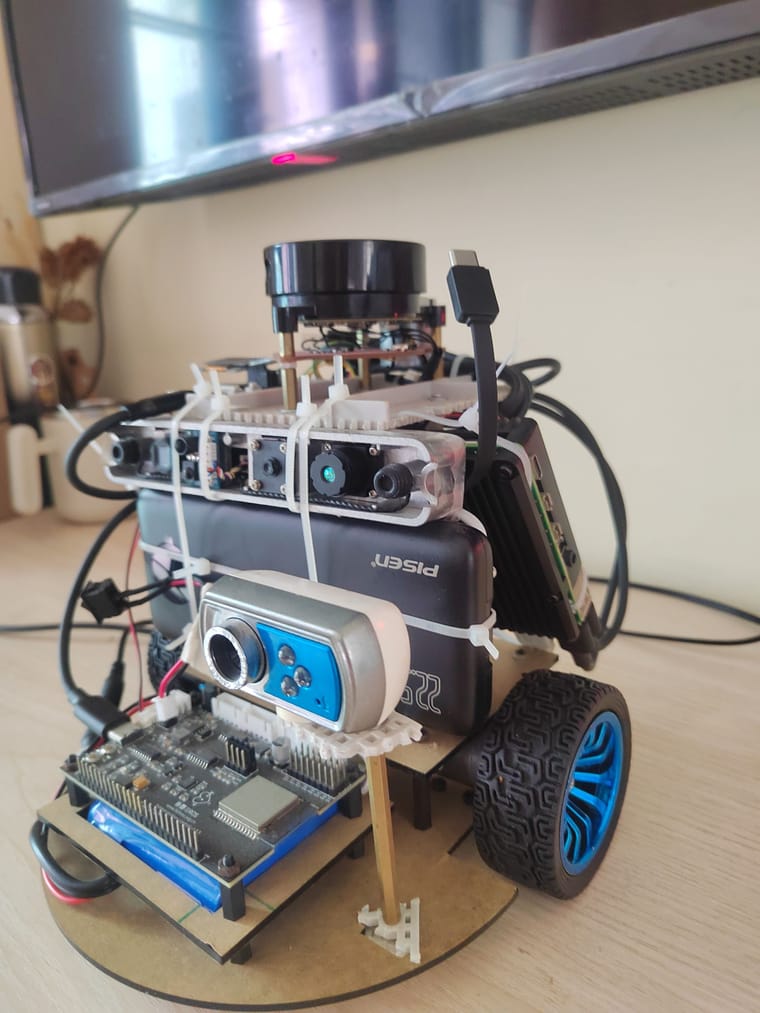 手搓啊,搞机器人躲不开手搓的,铜柱支起来,最上面是雷达,中间是深度摄像头,不过树莓派资源确实紧张,跑导航已经是极限了,没敢把深度摄像头用上,只敢搞个普通摄像头
手搓啊,搞机器人躲不开手搓的,铜柱支起来,最上面是雷达,中间是深度摄像头,不过树莓派资源确实紧张,跑导航已经是极限了,没敢把深度摄像头用上,只敢搞个普通摄像头 -
@17171680-1 我去这么高,我还是不用astrapro了吧,毕设随便跑一下得了,深度相机后面再自己玩
-
@17171680-1 你这个牛啊
-
@小鱼 鱼哥,现在用树莓派4b+ubuntu22桌面版+fishbot+ylidar x2手搓完成了,已经验证完所有,包括底板运动、雷达驱动、建图、存图,都正常,现在的问题是一导航,就挂图,也就是一导航,本来好好的地图,就变灰,导致设置的导航点路径规划都出不来,应该是树莓派的资源不够,有什么参数能调整的?比如nav2的路径规划参数?或者导航的验证不用rviz2?
-
@2075605318 这个总高度才30cm不到,不高了,这个机器人的问题是树莓派的资源不够,我现在跑个导航都没完成。。。深度更吃资源
-
@17171680-1 这个没办法,除非动nav2源码优化了,很麻烦
