路径规划出现 Transform data too old 所导致的问题
-
路径规划报错:[component_container_isolated-1] [ERROR] [1745042787.273346658] [tf_help]: Transform data too old when converting from map to odom
[component_container_isolated-1] [ERROR] [1745042787.273400807] [tf_help]: Data time: 1745042787s 246927386ns, Transform time: 270s 532000000ns
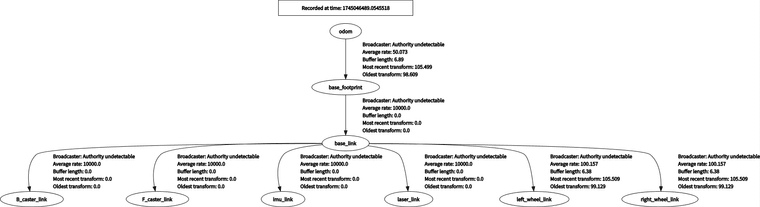
rqt显示静态TF有大问题,同时
使用ros2 run tf2_ros tf2_echo base_link B_caster_link
显示
At time 0.0- Translation: [-0.300, 0.000, -0.147]
- Rotation: in Quaternion [0.000, 0.000, 0.000, 1.000]
- Rotation: in RPY (radian) [0.000, -0.000, 0.000]
- Rotation: in RPY (degree) [0.000, -0.000, 0.000]
- Matrix:
1.000 0.000 0.000 -0.300
0.000 1.000 0.000 0.000
0.000 0.000 1.000 -0.147
0.000 0.000 0.000 1.000
时间为0.0
该怎么处理??卡住好几天了
-
解决了,不是tf的问题,是代码的问题
-
@CYX_ROS2 你好,如何解决的呢? 我学到第八章,也遇到了这个问题
-
是不是忘记发header里面的时间了