fishros机器人代码按照鱼哥的源码复制,但是用键盘控制小车,小车右轮永远比左轮快,走不了直线,pid值调了一下,还是右轮更快,请问这个该怎么解决?
-
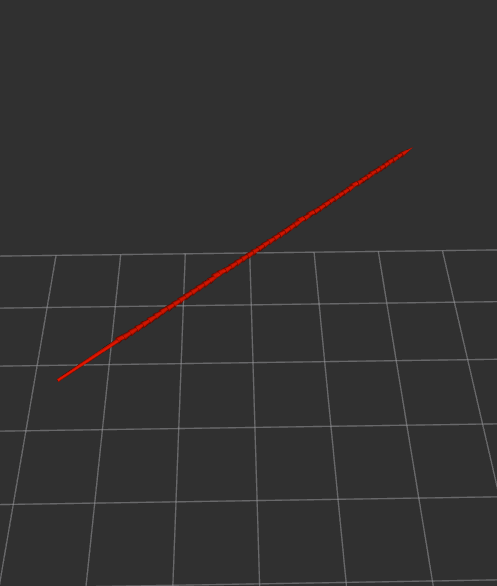
下图是rviz2显示的里程计前进就会拐弯
#include <Arduino.h> #include <Esp32PcntEncoder.h> #include <Esp32McpwmMotor.h> #include <PidController.h> #include <Kinematics.h> // 引入Microros和wifi相关的库 #include <WiFi.h> #include <micro_ros_platformio.h> #include <rcl/rcl.h> #include <rclc/rclc.h> #include <rclc/executor.h> #include <geometry_msgs/msg/twist.h> // 消息接口 #include <nav_msgs/msg/odometry.h>//里程计消息接口 #include <micro_ros_utilities/string_utilities.h>//引入字符串内存分配初始化工具 // 声明一些相关的结构体对象 rcl_allocator_t allocator; // 内存分配器,用于动态内存分配管理 rclc_support_t support; // 用于存储时钟,内存分配器和上下文,用于提供支持 rclc_executor_t executor; // 执行器,用于管理订阅和计时器回调的执行 rcl_node_t node; // 节点,用于创建节点 rcl_subscription_t sub_cmd_vel; // 创建一个订阅者 geometry_msgs__msg__Twist msg_cmd_vel; // 订阅到的数据存储到这里 rcl_publisher_t pub_odom;//创建一个里程计发布者 nav_msgs__msg__Odometry msg_odom;//里程计消息存储在这 rcl_timer_t timer;//定时器可以定时调用某个函数 Esp32PcntEncoder encoders[2]; // 创建一个数组用于存储两个编码器 Esp32McpwmMotor motor; // 创建一个名为motor的对象,用于控制电机 PidController pid_controller[2]; Kinematics kinematics; float target_linear_speed = 0.0; // 单位 毫米每秒 float target_angular_speed = 0.0; // 单位 弧度每秒 float out_left_speed = 0.0; // 输出的左右轮速度,不是反馈的左右轮速度 float out_right_speed = 0.0; // 定时器的回调函数 void timer_callback(rcl_timer_t* timer,int64_t last_call_time) { // 完成里程计的发布 odom_t odom = kinematics.get_odom(); // 获取当前的里程计 int64_t stamp = rmw_uros_epoch_millis(); // 获取当前的时间 msg_odom.header.stamp.sec = static_cast<int32_t>(stamp/1000); // 秒部分 msg_odom.header.stamp.nanosec = static_cast<int32_t>((stamp%1000)*1e6); // 纳秒部分 msg_odom.pose.pose.position.x = odom.x; msg_odom.pose.pose.position.y = odom.y; msg_odom.pose.pose.orientation.w = cos(odom.angle*0.5); msg_odom.pose.pose.orientation.x = 0; msg_odom.pose.pose.orientation.y = 0; msg_odom.pose.pose.orientation.z = sin(odom.angle*0.5); msg_odom.twist.twist.linear.x = odom.linear_speed; msg_odom.twist.twist.angular.z = odom.angular_speed; // 发布里程计,把数据发出去 if(rcl_publish(&pub_odom,&msg_odom,NULL)!=RCL_RET_OK) { Serial.println("error: odom pub failed!"); } } void twist_callback(const void * msg_in) { // 将受到的消息指针转换成 geometry_msgs__msg__Twist 类型的指针 const geometry_msgs__msg__Twist* msg = (const geometry_msgs__msg__Twist*)msg_in; target_linear_speed = msg->linear.x * 1000; target_angular_speed = msg->angular.z; kinematics.kinematics_inverse(target_linear_speed, target_angular_speed, &out_left_speed, &out_right_speed); Serial.printf("OUT:left_speed=%f,right_speed=%f\n", out_left_speed, out_right_speed); pid_controller[0].update_target(out_left_speed); pid_controller[1].update_target(out_right_speed); } // 单独创建一个任务运行 micro-ROS 相当于一个线程 void microros_task(void *args) { // 1.设置传输协议并延迟一段时间等待设置的完成 IPAddress agent_ip; agent_ip.fromString("192.168.3.149"); // 设置agent的IP地址 set_microros_wifi_transports("HUAWEI-R1CP6X", "xqdjx1703", agent_ip, 8888); // 设置传输协议 delay(3000); // 等待2秒,等待WIFI连接 // 2.初始化内存分配器 allocator = rcl_get_default_allocator(); // 获取默认的内存分配器 // 3.初始化支持 rclc_support_init(&support, 0, NULL, &allocator); // 初始化支持 // 4.初始化节点 rclc_node_init_default(&node, "fishbot_motion_control", "", &support); // 初始化节点 // 5.初始化执行器 unsigned int num_handles = 2; // 订阅和计时器的回调数量,注意这是一个要改的参数 rclc_executor_init(&executor, &support.context, num_handles, &allocator); // 初始化执行器 // 初始化订阅者,并将其添加到执行其中 rclc_subscription_init_best_effort(&sub_cmd_vel,&node, ROSIDL_GET_MSG_TYPE_SUPPORT(geometry_msgs,msg,Twist),"/cmd_vel"); rclc_executor_add_subscription(&executor,&sub_cmd_vel,&msg_cmd_vel,&twist_callback,ON_NEW_DATA); //初始化msgs初始化主机和从机 msg_odom.header.frame_id =micro_ros_string_utilities_set(msg_odom.header.frame_id,"odom"); msg_odom.child_frame_id =micro_ros_string_utilities_set(msg_odom.child_frame_id,"base_footprint"); //初始化发布者和定时器 rclc_publisher_init_best_effort(&pub_odom,&node,ROSIDL_GET_MSG_TYPE_SUPPORT(nav_msgs,msg,Odometry),"/odom"); rclc_timer_init_default(&timer,&support,RCL_MS_TO_NS(50),timer_callback); rclc_executor_add_timer(&executor,&timer); //时间同步 while(!rmw_uros_epoch_synchronized()) { rmw_uros_sync_session(1000);//超时时间 delay(10); } // 循环执行器 rclc_executor_spin(&executor); } // v=w*r // r = v/w = 0.05/0.1 = 0.5 0.02/0.1 = 0.2 m void setup() { // 初始化串口 Serial.begin(115200); // 初始化串口通信,设置通信速率为115200 // 初始化电机驱动器 motor.attachMotor(0, 22, 23); // 将电机0连接到引脚22和引脚23 motor.attachMotor(1, 12, 13); // 将电机1连接到引脚12和引脚13 // 初始化编码器 encoders[0].init(0, 32, 33); // 初始化第一个编码器,使用GPIO 32和33连接 encoders[1].init(1, 26, 25); // 初始化第二个编码器,使用GPIO 26和25连接 // 初始化PID控制器的参数 pid_controller[0].update_pid(0.625, 0.125, 0.0); pid_controller[1].update_pid(0.625, 0.125, 0.0); pid_controller[0].out_limit(-100, 100); pid_controller[1].out_limit(-100, 100); // 初始化运动学参数 kinematics.set_wheel_distance(175); // mm kinematics.set_motor_param(0, 0.105805); kinematics.set_motor_param(1, 0.105805); // 测试下运动学逆解 // 创建一个任务运行 micro-ROS xTaskCreate(microros_task, "microros_task", 10240, NULL, 1, NULL); } void loop() { delay(10); // 等待10毫秒 kinematics.update_motor_speed(millis(), encoders[0].getTicks(), encoders[1].getTicks()); // 记得调用更新电机速度函数 motor.updateMotorSpeed(0, pid_controller[0].update( kinematics.get_motor_speed(0))); motor.updateMotorSpeed(1, pid_controller[1].update(kinematics.get_motor_speed(1))); // Serial.printf("speed1=%d,speed2=%d\n",kinematics.get_motor_speed(0),kinematics.get_motor_speed(1)); // Serial.printf("x,y,yaw=%f,%f,%f\n", kinematics.get_odom().x, kinematics.get_odom().y, kinematics.get_odom().angle);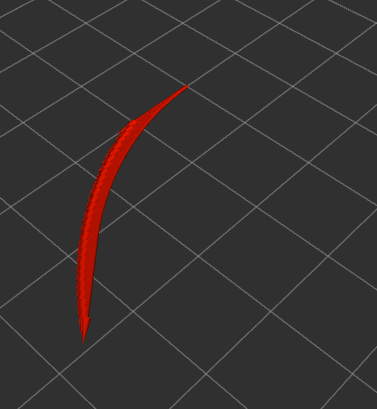
-
@抱着咸鱼的啊黄 直接用我的固件也这样子吗
-
@小鱼 是的,之前用固件,后来跟着教程也是这样的
-
@小鱼 我尝试调pid的值,发现怎么调在rviz里面永远右轮比左轮快,甚至感觉没啥变化
-
@抱着咸鱼的啊黄 调pid应该没用,你下发的速度是什么样子的,里程计和实际对不对的上 ,如果对的上,根据里程计的反馈动态控制左右轮速度就可以走直线了
-
@小鱼 下发的速度是什么呢,是指键盘节点控制的速度嘛,里程计和实际对的上,实际左轮就是比右轮慢很多
-
@小鱼 鱼神,我发现键盘节点降低小车线速度好像就解决了