Your browser does not seem to support JavaScript. As a result, your viewing experience will be diminished, and you have been placed in read-only mode.
Please download a browser that supports JavaScript, or enable it if it's disabled (i.e. NoScript).
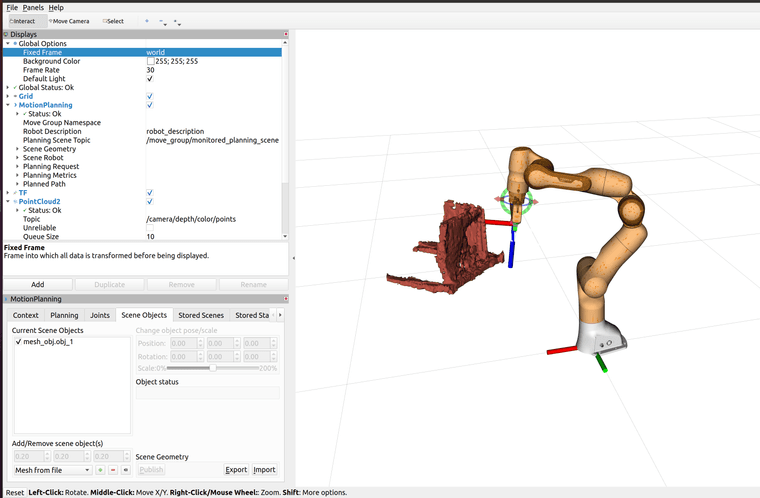
大佬们,请教一个问题,我的环境是ros1 noetic。我利用moveit进行运动规划;启动以后,在rviz中的motionplanning中的scene objects添加物体,publish出去以后。我进行运动规划的时候感觉并没有识别到我发布的这个物体。不知道是什么原因;是没有成功发布?还是发布的物体没有看来障碍物?还是需要什么其他的设置呢。