踩坑--激光雷达安装
-
安装说明:
1、lsm10_v2功能包是在Linux ROS2环境中使用。该软件包在Ubuntu18.04上使用ROS2 Eloquent版本进行了测试。
2、这是m10雷达驱动程序包,在将包克隆到工作区后,使用colcon build --packages-select lsm10_v2 进行编译。
编译说明:
第一次编译时,需要将lsm10_v2功能包中的CMakeLists.txt文件内容替换成1-CMakeLists.txt文件后再进行编译;
编译完成后,再将CMakeLists.txt文件内容替换成2-CMakeLists.txt的内容编译即可。3、发布话题:
/scan(sensor_msgs/scan)
/difop_information
4、启动节点
ros2 launch lsm10_v2 ls_m10.launch.py
步骤2编译报错 安装失败CMake Error at CMakeLists.txt:27 (find_package):
By not providing "Finddynamic_reconfigure.cmake" in CMAKE_MODULE_PATH this
project has asked CMake to find a package configuration file provided by
"dynamic_reconfigure", but CMake did not find one.显示缺少依赖,用下面命令安装包依赖(我的ros2版本 foxy)
sudo apt install python3-pip //安装pip sudo pip install rosdepc //安装ros2依赖工具 sudo rosdepc init //初始化rosdepc rosdepc update //更新rosdepc rosdepc install -i --from-path src --rosdistro foxy -y //安装包依赖提示:小鱼rosdepc正式为您服务
ERROR: the following packages/stacks could not have their rosdep keys resolved
to system dependencies:
lsm10_v2: Cannot locate rosdep definition for [tf]还是不成功

今天是星期六,雷达的技术不上班,看来要星期一等雷达技术上班解决了,显示缺少依赖 dynamic_reconfigure 我查了度娘这个是加载动态参数的依赖,有会安装的告诉我一下,要不只能等星期一雷达工程师了 -
@毛哥 他们应该没有发布foxy版本的驱动
-
@小鱼 没有发布foxy版本驱动有点悲催了,只能等星期一技术上班再问了
-
在技术指导下,雷达能工作了,上个图
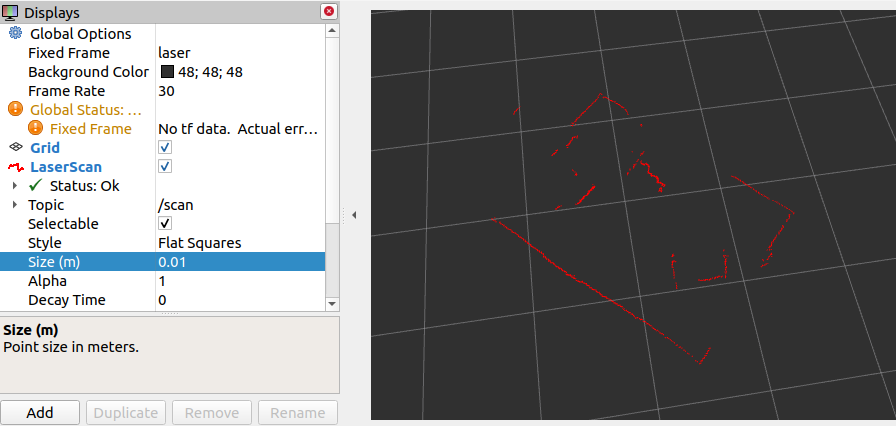
插在笔记本上到室外强光下转了一圈,阳光对它应该是没有影响 -
@毛哥 安装好的效果

不干胶粘上的

-
新问题出现了,笔记本主控 /dev/ttyUSB0 控制电机控制板, /dev/ttyUSB1 接雷达,2个usb口不固定,拔下来在插上usb0 有时就变成usb1了,固定的usb口端口号为什么总是变呢,每次插usb设备还的插上arduino板看看端口号对不对,lsusb命令有点看不懂, 懂得朋友你们是怎么解决这个问题的呢?
-
参考以下网址,usb端口号不固定问题完美解决。
https://blog.csdn.net/weixin_40639095/article/details/108490329 -
@毛哥成山轮胎机油保养 大哥 您还有M10的ROS2资料么