rviz在开启建图时报错,建图后的地图很乱,该怎么解决
-
问题描述:
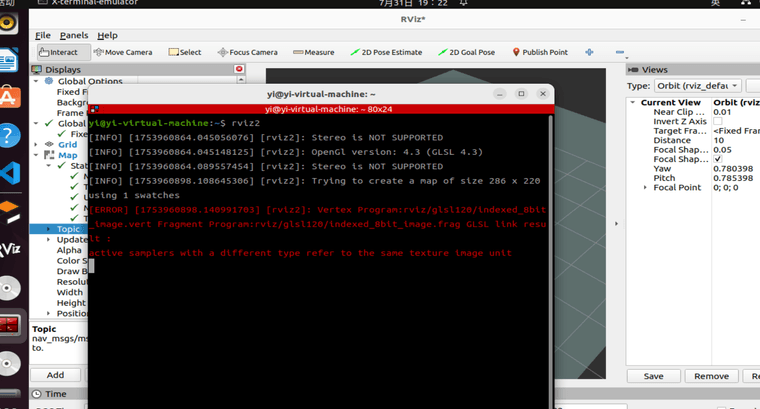
出现了如图所示的报错
[ERROR] [1753779025.670329548] [rviz2]: Vertex Program:rviz/glsl120/indexed_8bit_image.vert Fragment Program:rviz/glsl120/indexed_8bit_image.frag GLSL link result :
active samplers with a different type refer to the same texture image unit
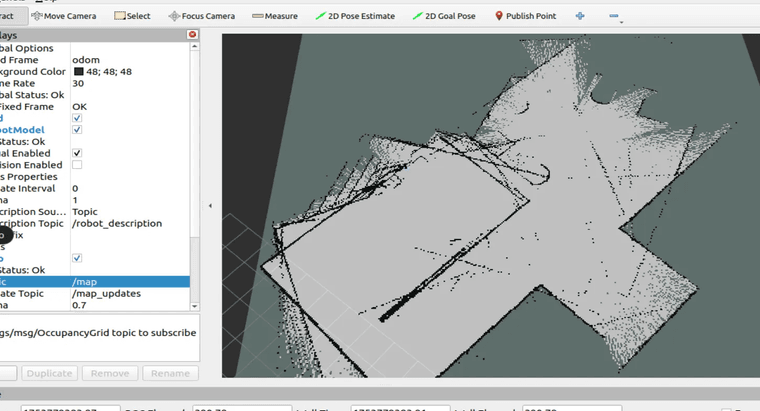
,此后自己在进行仿真建图时,出现的地图如图二所示很杂乱具体细节和上下文:
在准备好gazebo环境,使用命令行ros2 launch slam_box online_async_launch.py use_sim_time:=True
后,再打开rviz2开始map插件,并将topic话题选择/map过后,便出现了如图所示的报错,此后自己在进行仿真建图时,出现的地图如图二所示很杂乱 ,而且地图更新的很慢尝试过的解决方法:
自己后来根据ai的解决方案,排除了环境的原因也尝试重新安装rviz2,且采用强制兼容的模式MESA_GL_VERSION_OVERRIDE=3.3,也没能解决