Your browser does not seem to support JavaScript. As a result, your viewing experience will be diminished, and you have been placed in read-only mode.
Please download a browser that supports JavaScript, or enable it if it's disabled (i.e. NoScript).
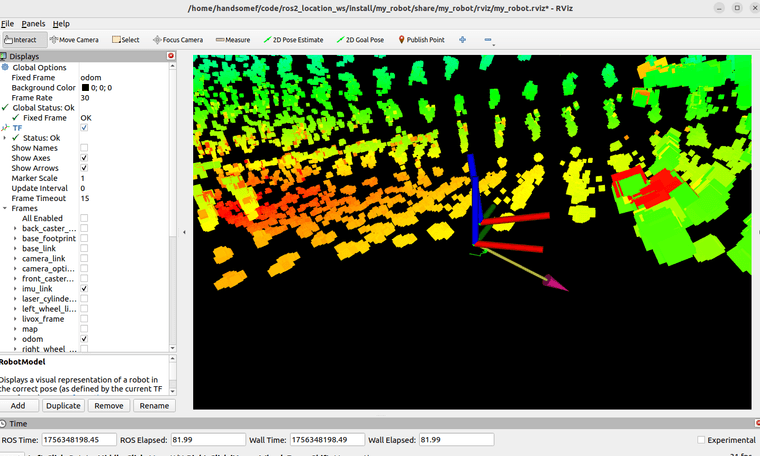
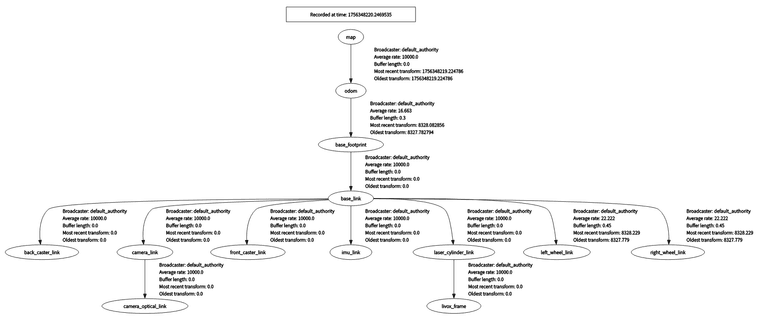
实际建模中我将imu放置机器人中心base_link,但是从rviz2上观察imu与odom的z轴明显存在偏移,没有对齐。按照我的建模情况应该时要对齐的,我关闭小车的odom,并使用fast-lio作为里程计,将fast-lio中的camera_init作为odom,body作为小车的base_footprint,为什么一启动,小车就会出现抖动,而且rviz2中小车也没有相对地面平放
哥们这么有钱,密道360装这车上
 实际建模中我将imu放置机器人中心base_link,但是从rviz2上观察imu与odom的z轴明显存在偏移,没有对齐。按照我的建模情况应该时要对齐的,我关闭小车的odom,并使用fast-lio作为里程计,将fast-lio中的camera_init作为odom,body作为小车的base_footprint,为什么一启动,小车就会出现抖动,而且rviz2中小车也没有相对地面平放
实际建模中我将imu放置机器人中心base_link,但是从rviz2上观察imu与odom的z轴明显存在偏移,没有对齐。按照我的建模情况应该时要对齐的,我关闭小车的odom,并使用fast-lio作为里程计,将fast-lio中的camera_init作为odom,body作为小车的base_footprint,为什么一启动,小车就会出现抖动,而且rviz2中小车也没有相对地面平放