ros2一键安装下载很慢
-
Ubuntu18.04安装ros2 一键安装,卡在下载镜像这里,很慢很慢,换过源,翻过墙,换过网络,还是不行,而且在重试几次后,还没下载完他就让我给容器命名,开始安装,现在安装的不能用 图片地址)
图片地址)
RUN Choose Task:[请输入括号内的数字]
---众多工具,等君来用---
[1]:一键安装:ROS(支持ROS和ROS2,树莓派Jetson)
[11]:一键安装:ROS+Docker(支持所有版本ROS/ROS2)
[2]:一键安装:github桌面版(小鱼常用的github客户端)
[3]:一键配置:rosdep(小鱼的rosdepc,又快又好用)
[4]:一键配置:ROS环境(快速更新ROS环境设置,自动生成环境选择)
[5]:一键配置:系统源(更换系统源,支持全版本Ubuntu系统)
[6]:一键安装:nodejs
[7]:一键安装:VsCode开发工具
[8]:一键安装:Docker
[9]:一键安装:Cartographer(内测版v0.1)
[10]:一键安装:微信(可以在Linux上使用的微信)
[12]:一键安装:PlateformIO MicroROS开发环境(支持Fishbot)
[77]:测试模式:运行自定义工具测试
[0]:quit
请输入[]内的数字以选择:11
--2023-04-09 00:05:06-- http://fishros.com/install/install1s/tools/tool_install_ros_with_docker.py
正在解析主机 fishros.com (fishros.com)... 139.9.131.171
正在连接 fishros.com (fishros.com)|139.9.131.171|:80... 已连接。
已发出 HTTP 请求,正在等待回应... 200 OK
长度: 11540 (11K) [application/octet-stream]
正在保存至: “/tmp/fishinstall/tools/tool_install_ros_with_docker.py”/tmp/fishinstall/to 100%[===================>] 11.27K --.-KB/s 用时 0.003s
2023-04-09 00:05:07 (4.11 MB/s) - 已保存 “/tmp/fishinstall/tools/tool_install_ros_with_docker.py” [11540/11540])
--2023-04-09 00:05:07-- http://fishros.com/install/install1s/tools/tool_install_vscode.py
正在解析主机 fishros.com (fishros.com)... 139.9.131.171
正在连接 fishros.com (fishros.com)|139.9.131.171|:80... 已连接。
已发出 HTTP 请求,正在等待回应... 200 OK
长度: 1366 (1.3K) [application/octet-stream]
正在保存至: “/tmp/fishinstall/tools/tool_install_vscode.py”/tmp/fishinstall/to 100%[===================>] 1.33K --.-KB/s 用时 0s
2023-04-09 00:05:07 (384 MB/s) - 已保存 “/tmp/fishinstall/tools/tool_install_vscode.py” [1366/1366])
--2023-04-09 00:05:07-- http://fishros.com/install/install1s/tools/tool_install_docker.py
正在解析主机 fishros.com (fishros.com)... 139.9.131.171
正在连接 fishros.com (fishros.com)|139.9.131.171|:80... 已连接。
已发出 HTTP 请求,正在等待回应... 200 OK
长度: 2882 (2.8K) [application/octet-stream]
正在保存至: “/tmp/fishinstall/tools/tool_install_docker.py”/tmp/fishinstall/to 100%[===================>] 2.81K --.-KB/s 用时 0s
2023-04-09 00:05:07 (595 MB/s) - 已保存 “/tmp/fishinstall/tools/tool_install_docker.py” [2882/2882])
欢迎使用一键安装ROS-Docker版,支持所有版本ROS,本工具由作者小鱼提供
================================1.版本选择======================================
RUN Choose Task:[请输入括号内的数字]
请选择你要安装的ROS版本名称(请注意ROS1和ROS2区别):
[1]:noetic
[2]:humble
[3]:foxy
[4]:galactic
[5]:melodic
[6]:rolling
[7]:kinetic
[8]:eloquent
[9]:dashing
[10]:crystal
[11]:bouncy
[12]:ardent
[13]:lunar
[14]:indigo
[0]:quit
请输入[]内的数字以选择:3
你选择了foxy(ROS2),该版本目前状态:长期支持
================================2.安装Docker======================================
Run CMD Task:[docker version]
[-]Result:success a0e4e17bddfbd388f38=================3.下载镜像(该步骤因网络原因会慢一些,若失败请重试)==================
Run CMD Task:[sudo docker pull fishros2/ros:foxy-desktop ]
foxy-desktop: Pulling from fishros2/ros
d7bfe07ed847: Downloading 3.75MB
bf1e38681d9b: Download complete
8a44b59555aa: Downloading 3.964MB/5.547MB
12f29772f338: Download complete
0b699c33a199: Download complete
eb42810f84e6: Downloading 3.771MB/120.1MB
81f92457a493: Waiting
476e616a9070: Waiting
fa71ae8a0c62: Waiting
dd9ad8294024: Waiting
d0def727ac77: Waiting
6bdbc4056f24: Waiting
3875ea8ce72b: Waiting 图片地址)
图片地址)
yang@ubuntu:~$ ros2 run turtlesim turtlesim_node
请输入指令控制ros2: 重启(r) 进入(e) 启动(s) 关闭(c) 删除(d) 测试(t):
e
Error response from daemon: No such container: ros2
yang@ubuntu:~$ -
这是文件里搜索ros的结果,不知道算不算安装完成
 图片地址)
图片地址) -
@3180911822 docker原因了,直接选1安装呢
-
@小鱼
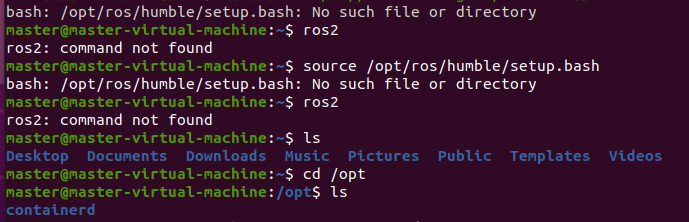 master@master-virtual-machine:~$ source /opt/ros/humble/setup.bash
master@master-virtual-machine:~$ source /opt/ros/humble/setup.bash
bash: /opt/ros/humble/setup.bash: No such file or directory
一键安装ros2之后还是出现了这个问题,并且/opt目录下只有一个文件夹container,咋回事鱼哥 -
@小鱼 选1安装ros2是不是只能安装foxy版本
-
@小鱼 有没有不用docker 的 ros2 安装呢 箱装 humBle